pose estimation using RANSAC
Hi Hi Everyone,
As I posted before i had a problem with solvePnPRansac pose estimation. I solved that issues as I was doing something in mapping of my data.
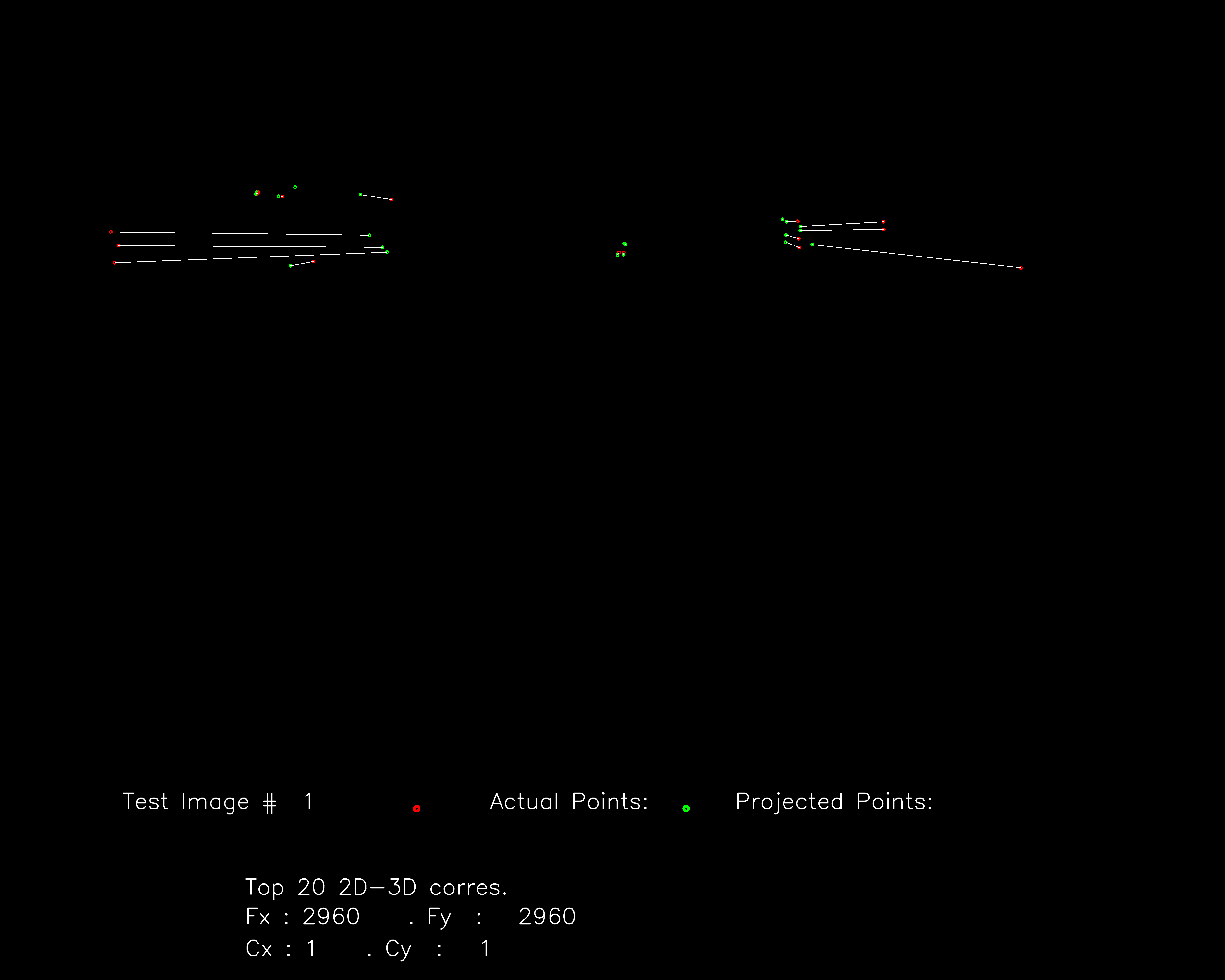
I generate vectors of 2D points and corresponding 3D points (Top 20 matches). Then I generate a Camera Matrix =[fx 1 cx; 1 fy cy;0 0 1] and I assume distortion coefficients are zero. Then I apply solvePnPRANSAC to estimate the pose. I get inliers. I am using 10 Error Threshold in RANSAC function and run it for 200 iterations.
From pose, I reproject my points back. Some reprojected points are coming very far from actual image points. Please see the attached figure.
So I am wondering if there is any step needed before calling RANSAC to ensure good results. !
waiting for replies . . image description

{kind=link}