Inverse Perspective Mapping
Hi,
I would like to generate the birds eye view of an input image (given as Mat) with OpenCV. The intrinsic and extrinsic parameters of the camera are known.
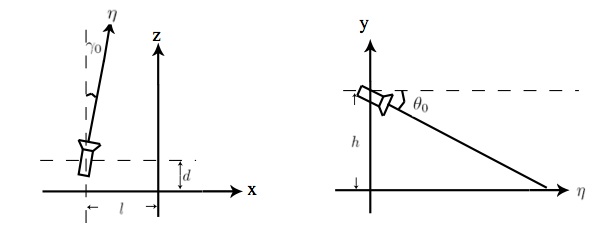
Among other things I need to know the Viewpoint of the camera (l,h,d) and the viewing direction:
So my question is how can I determine these parameters with the help of the known intrinsic and extrinsic parameters? Or have I to measure them otherwise?
Thank you.
add a comment

{kind=link}