Negative values for y-coordinates after Triangulation
Hi,
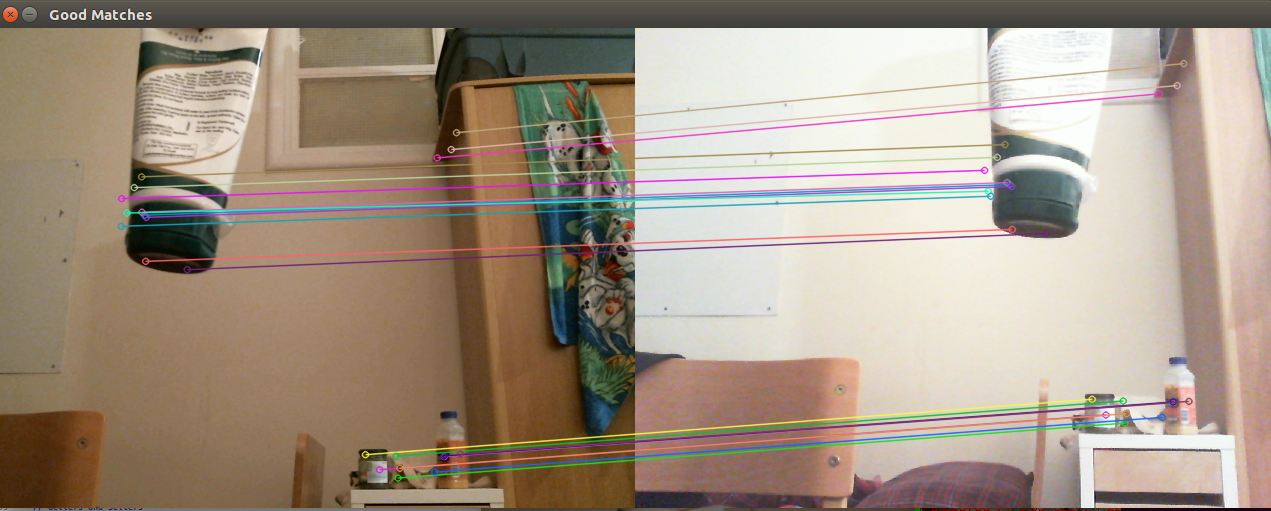
I have been able to implement a basic version of triangulation ( using SIFT detector for stereo correspondence problem ) I have also noticed that the triangulation gives a poor result if the SIFT detector matches non-corresponding or incorrect feature points. However, as seen in images below, the SIFT detector seems to be doing a good job for the given frame. However the triangulation doesn't seem to work out.
Kindly see images below for a given stereo camera setup-
1) Stereo Correspondence (for left and right camera images):
2) Triangulation (only shown in left camera image->):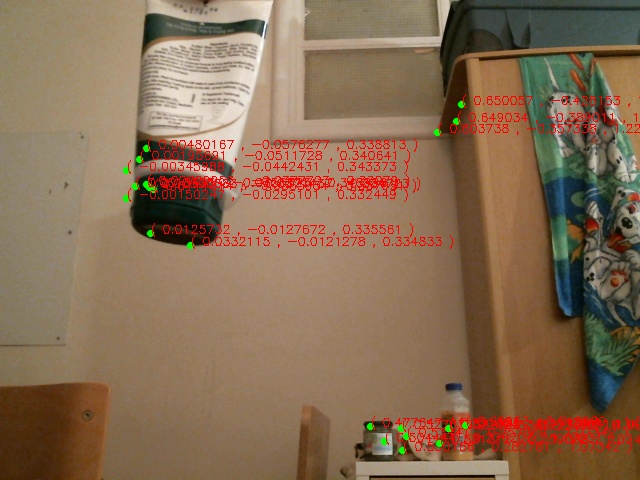
Clearly, the y-coordinate is negative while values of x and z-coordinate for short distances seem "reasonable" (given that I have a rms re-projection error = 0.87 after calibration, which I'm aware needs to be improved).
My Question:
1) Is the camera pinhole model in openCV actually having the y-axis inverted ?
2) Is this a standard result of triangulation using openCV, ie having negative y-values ?
Any help would be greatly appreciated.
I was wondering the same thing but thanks for confirming that from the docs. If you can write this down as the answer instead of a comment, I will mark it as the answer.