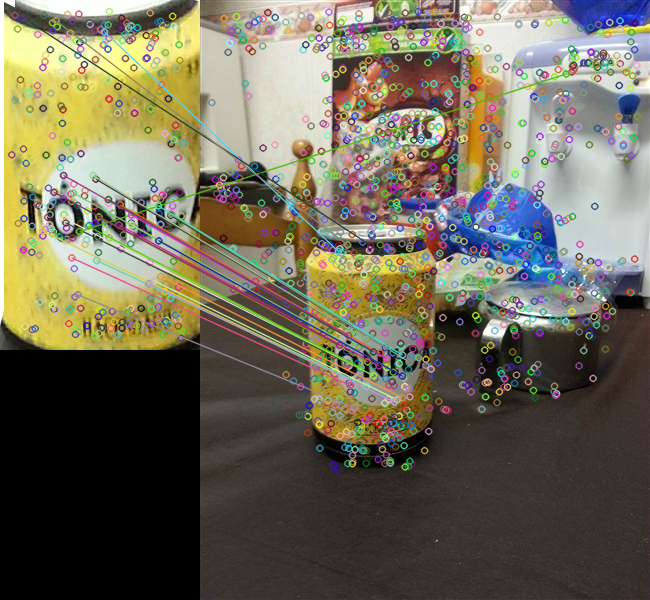
Surf and Brisk have terrible accuracy
I have been trying both Surf and Brisk and none of them seem to recognize a single object in a photo.
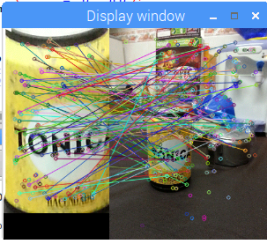
I have tried with a lot of photos like these:




I also have tried with books and other sort of objects but with no result!
Code of brisk and surf implementations below:
BRISK
const char * PimA="image1.jpg"; // object
const char * PimB="image2.jpg"; // image
cv::Mat GrayA = getMatByName(PimA);
cv::Mat GrayB = getMatByName(PimB);
std::vector<cv::KeyPoint> keypointsA, keypointsB;
cv::Mat descriptorsA, descriptorsB;
//set brisk parameters
int Threshl=10;
int Octaves=4;
float PatternScales=1.0f;
//declare a variable BRISKD of the type cv::BRISK
cv::BRISK BRISKD(Threshl,Octaves,PatternScales);//initialize algoritm
BRISKD.create("Feature2D.BRISK");
BRISKD.detect(GrayA, keypointsA);
BRISKD.compute(GrayA, keypointsA,descriptorsA);
BRISKD.detect(GrayB, keypointsB);
BRISKD.compute(GrayB, keypointsB,descriptorsB);
cv::FlannBasedMatcher matcher(new cv::flann::LshIndexParams(20,10,2));
std::vector<cv::DMatch> matches;
matcher.match(descriptorsA, descriptorsB, matches);
std::vector<cv::DMatch> goodMatches;
int min = 1000, max = 0;
for(int i=0; i<matches.size(); i++){
if(matches[i].distance < min)
min = matches[i].distance;
if(matches[i].distance > max)
max = matches[i].distance;
}
printf("min - max %d %d\n", min, max);
for(int i=0; i<matches.size(); i++)
if(matches[i].distance < min*3)
goodMatches.push_back(matches[i]);
cv::Mat all_matches;
cv::drawMatches( GrayA, keypointsA, GrayB, keypointsB,
goodMatches, all_matches, cv::Scalar::all(-1), cv::Scalar::all(-1),
vector<char>(),cv::DrawMatchesFlags::DEFAULT );
showImage(all_matches, 1);
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for( int i = 0; i < goodMatches.size(); i++ )
{
//-- Get the keypoints from the good matches
obj.push_back( keypointsA[ goodMatches[i].queryIdx ].pt );
scene.push_back( keypointsB[ goodMatches[i].trainIdx ].pt );
}
Mat H = findHomography(obj, scene, CV_RANSAC);
std::vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0);
obj_corners[1] = cvPoint( GrayA.cols, 0 );
obj_corners[2] = cvPoint( GrayA.cols, GrayA.rows );
obj_corners[3] = cvPoint( 0, GrayA.rows );
std::vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, H);
//-- Draw lines between the corners (the mapped object in the scene - image_2 )
line( GrayB, scene_corners[0] + Point2f( GrayA.cols, 0), scene_corners[1] + Point2f( GrayA.cols, 0), Scalar(0, 0, 255), 4 );
line( GrayB, scene_corners[1] + Point2f( GrayA.cols, 0), scene_corners[2] + Point2f( GrayA.cols, 0), Scalar( 0, 0, 255), 4 );
line( GrayB, scene_corners[2] + Point2f( GrayA.cols, 0), scene_corners[3] + Point2f( GrayA.cols, 0), Scalar( 0, 0, 255), 4 );
line( GrayB, scene_corners[3] + Point2f( GrayA.cols, 0), scene_corners[0] + Point2f( GrayA.cols, 0), Scalar( 0, 0, 255), 4 );
showImage(GrayB, 1);
SURF
Mat img_object = imread( "image1.jpg", CV_LOAD_IMAGE_GRAYSCALE );
Mat img_scene = imread( "image2.jpg", CV_LOAD_IMAGE_GRAYSCALE );
if( !img_object.data || !img_scene.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; }
//-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400;
SurfFeatureDetector detector( minHessian );
std::vector<KeyPoint> keypoints_object, keypoints_scene;
detector.detect( img_object, keypoints_object );
detector.detect( img_scene, keypoints_scene );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_object, descriptors_scene;
extractor.compute( img_object, keypoints_object, descriptors_object );
extractor.compute( img_scene, keypoints_scene, descriptors_scene );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< ...
Have you tried different matching methods? In my experience BruteForceMatcher (takes longer) achieves better results. You could also try to implement a symmetry test so good matches will just be taken if matches1to2 == matches2to1 Here are different approaches: https://stackoverflow.com/questions/1... It also seems to me that the smaller images are quite blurred. Shouldn't be a problem for SURF though, I think.