Re-distorting a set of points after camera calibration
I am working on a project in Python to calibrate a small thermal camera sensor (FLIR Lepton). Because of limited resolution initial distortion removal is not very exact. By using an iterative method I should be able to refine this calibration (for those of you with access to scientific articles, see this link). This requires me to take the following steps:
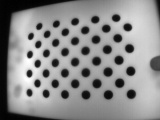
- Use a set of images of a calibration pattern to estimate the initial distortion
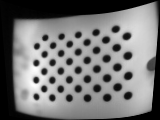
- Undistort the images
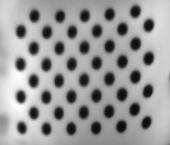
- Apply a perspective correction to the undistorted images
- Re-estimate the calibration point positions
- Remap these refined calibration points back to the original images
- Use the refined points to re-estimate the distortion
- Repeat until the RMS-error converges
I am stuck at step four. Below you see the commands I used to remove the camera distortion from the original image using the camera matrices and the distortion matrix.
mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5)
dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR)
So far I am not able to figure out how to reverse these commands to remap the new point positions to the original image. So far I am able to do (roughly in order of the steps above):

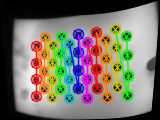
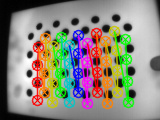
I have looked online and found the same question a bunch of times, with several examples in C++, which I cannot fully comprehend and modify for my purposes. I have tried the solution suggested by this post but this has not yielded the desired results, see last image above. There is my code of that solution
def distortBackPoints(x, y, cameraMatrix, dist):
fx = cameraMatrix[0,0]
fy = cameraMatrix[1,1]
cx = cameraMatrix[0,2]
cy = cameraMatrix[1,2]
k1 = dist[0][0] * -1
k2 = dist[0][1] * -1
k3 = dist[0][4] * -1
p1 = dist[0][2] * -1
p2 = dist[0][3] * -1
x = (x - cx) / fx
y = (y - cy) / fy
r2 = x*x + y*y
xDistort = x * (1 + k1 * r2 + k2 * r2 * r2 + k3 * r2 * r2 * r2)
yDistort = y * (1 + k1 * r2 + k2 * r2 * r2 + k3 * r2 * r2 * r2)
xDistort = xDistort + (2 * p1 * x * y + p2 * (r2 + 2 * x * x))
yDistort = yDistort + (p1 * (r2 + 2 * y * y) + 2 * p2 * x * y)
xDistort = xDistort * fx + cx;
yDistort = yDistort * fy + cy;
return xDistort, yDistort
Then using this command to call the function
corners2 = []
for point in corners:
x, y = distortBackPoints(point[0][0], point[0][1], newcameramtx, dist)
corners2.append([x,y])
I am new to OpenCV and computer vision, so my knowledge about the algebra of these solutions is limited. Any hands on examples or correction to my current code would be greatly appreciated.
Kind regards,
Bart

calibrateCamera is already an iterative method
Is it a flat grid?
How do you make circle in IR ?
Hi LBerger,
The iterative method is ment to enhance the accuracy of the circle positions, since these thermal camera images are usually very low resolution, and thus less accurate.
The circles are made by using a laser cutter and the cardboard is heated so that it thermally contrasts with the background.
@bart.p1990 Thanks I will try laser cutter. About Calibration now If you calibrate calibrated image I think you are using k1,k2,k3,k4,k5 and k6. I don't know python but I think you should try it. with a field of view of 60° (lepton 3) I don't think you would need fisheye module
Can you explain more in detail what you mean? This is my current code to get the camera calibration:
Which flags would I need to set to turn off the fisheye distortion model / possibly get better calibration?
My image turns out pretty bad when I try to undistort it the the next time around
sometimes it is difficult to fit parameters. It is better to fit first k1 k2 k3 and reuse this parameter as initial value to fit all parameters I don't know python. I give you c++ function :
Thank you! I have not been able to make a difference using this suggestion.
Can you post images?