This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main(int, char**)
{
Mat src,edges;
src = imread("15016889798859437.jpg");
cvtColor(src, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(5, 5), 1.5, 1.5);
erode(edges, edges, Mat());// these lines may need to be optimized
dilate(edges, edges, Mat());
dilate(edges, edges, Mat());
erode(edges, edges, Mat());
Canny(edges, edges, 50, 150, 3); // canny parameters may need to be optimized
imshow("edges", edges);
vector<Point> selected;
vector<vector<Point> > contours;
findContours(edges, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
Rect minRect = boundingRect(contours[i]);
if (minRect.width > 150 & minRect.height > 150) // this line also need to be optimized
{
selected.insert(selected.end(), contours[i].begin(), contours[i].end());
}
}
Rect minRect = boundingRect(selected);
convexHull(selected, selected);
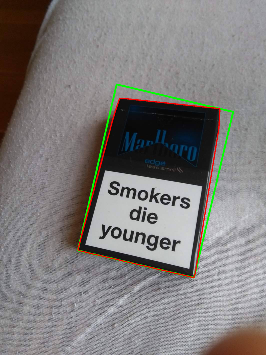
polylines(src, selected, true, Scalar(0, 0, 255), 2);
resize(src, src, Size(), 0.5, 0.5); // you can remove this line to keep the image original size
imshow("result", src);
waitKey(0);
return 0;
}
| | 2 | No.2 Revision |
EDIT: improved code. i like it.
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
static std::vector<cv::Point> extremePoints(std::vector<cv::Point>pts)
{
int xmin = 0, ymin = 0, xmax = -1, ymax = -1, i;
Point ptxmin, ptymin, ptxmax, ptymax;
Point pt = pts[0];
ptxmin = ptymin = ptxmax = ptymax = pt;
xmin = xmax = pt.x;
ymin = ymax = pt.y;
for (size_t i = 1; i < pts.size(); i++)
{
pt = pts[i];
if (xmin > pt.x)
{
xmin = pt.x;
ptxmin = pt;
}
if (xmax < pt.x)
{
xmax = pt.x;
ptxmax = pt;
}
if (ymin > pt.y)
{
ymin = pt.y;
ptymin = pt;
}
if (ymax < pt.y)
{
ymax = pt.y;
ptymax = pt;
}
}
std::vector<cv::Point> res;
res.push_back(ptxmin);
res.push_back(ptxmax);
res.push_back(ptymin);
res.push_back(ptymax);
return res;
}
void sortCorners(std::vector<cv::Point2f>& corners)
{
std::vector<cv::Point2f> top, bot;
cv::Point2f center;
// Get mass center
for (int i = 0; i < corners.size(); i++)
center += corners[i];
center *= (1. / corners.size());
for (int i = 0; i < corners.size(); i++)
{
if (corners[i].y < center.y)
top.push_back(corners[i]);
else
bot.push_back(corners[i]);
}
corners.clear();
if (top.size() == 2 && bot.size() == 2) {
cv::Point2f tl = top[0].x > top[1].x ? top[1] : top[0];
cv::Point2f tr = top[0].x > top[1].x ? top[0] : top[1];
cv::Point2f bl = bot[0].x > bot[1].x ? bot[1] : bot[0];
cv::Point2f br = bot[0].x > bot[1].x ? bot[0] : bot[1];
corners.push_back(tl);
corners.push_back(tr);
corners.push_back(br);
corners.push_back(bl);
}
}
int main(int, char**)
{
Mat src,edges;
src, edges;
src = imread("15016889798859437.jpg");
cvtColor(src, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(5, 5), 1.5, 1.5);
erode(edges, edges, Mat());// these lines may need to be optimized
dilate(edges, edges, Mat());
dilate(edges, edges, Mat());
erode(edges, edges, Mat());
Canny(edges, edges, 50, 150, 3); // canny parameters may need to be optimized
imshow("edges", edges);
vector<Point> selected;
vector<vector<Point> > contours;
findContours(edges, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
Rect minRect = boundingRect(contours[i]);
if (minRect.width > 150 & minRect.height > 150) // this line also need to be optimized
{
selected.insert(selected.end(), contours[i].begin(), contours[i].end());
}
}
Rect minRect = boundingRect(selected);
}
convexHull(selected, selected);
RotatedRect minRect = minAreaRect(selected);
std::vector<cv::Point> corner_points = extremePoints(selected);
std::vector<cv::Point2f> corners;
corners.push_back(corner_points[0]);
corners.push_back(corner_points[1]);
corners.push_back(corner_points[2]);
corners.push_back(corner_points[3]);
sortCorners(corners);
cv::Mat quad = cv::Mat::zeros(norm(corners[1] - corners[2]), norm(corners[2] - corners[3]), CV_8UC3);
std::vector<cv::Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts);
cv::warpPerspective(src, quad, transmtx, quad.size());
resize(quad, quad, Size(), 0.25, 0.25); // you can remove this line to keep the image original size
imshow("quad", quad);
polylines(src, selected, true, Scalar(0, 0, 255), 2);
resize(src, src, Size(), 0.5, 0.5); // you can remove this line to keep the image original size
imshow("result", src);
waitKey(0);
return 0;
}
---------------->

| | 3 | No.3 Revision |
EDIT: improved code. i like it.get the result image
---------------->
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
static std::vector<cv::Point> extremePoints(std::vector<cv::Point>pts)
{
int xmin = 0, ymin = 0, xmax = -1, ymax = -1, i;
Point ptxmin, ptymin, ptxmax, ptymax;
Point pt = pts[0];
ptxmin = ptymin = ptxmax = ptymax = pt;
xmin = xmax = pt.x;
ymin = ymax = pt.y;
for (size_t i = 1; i < pts.size(); i++)
{
pt = pts[i];
if (xmin > pt.x)
{
xmin = pt.x;
ptxmin = pt;
}
if (xmax < pt.x)
{
xmax = pt.x;
ptxmax = pt;
}
if (ymin > pt.y)
{
ymin = pt.y;
ptymin = pt;
}
if (ymax < pt.y)
{
ymax = pt.y;
ptymax = pt;
}
}
std::vector<cv::Point> res;
res.push_back(ptxmin);
res.push_back(ptxmax);
res.push_back(ptymin);
res.push_back(ptymax);
return res;
}
void sortCorners(std::vector<cv::Point2f>& corners)
{
std::vector<cv::Point2f> top, bot;
cv::Point2f center;
// Get mass center
for (int i = 0; i < corners.size(); i++)
center += corners[i];
center *= (1. / corners.size());
for (int i = 0; i < corners.size(); i++)
{
if (corners[i].y < center.y)
top.push_back(corners[i]);
else
bot.push_back(corners[i]);
}
corners.clear();
if (top.size() == 2 && bot.size() == 2) {
cv::Point2f tl = top[0].x > top[1].x ? top[1] : top[0];
cv::Point2f tr = top[0].x > top[1].x ? top[0] : top[1];
cv::Point2f bl = bot[0].x > bot[1].x ? bot[1] : bot[0];
cv::Point2f br = bot[0].x > bot[1].x ? bot[0] : bot[1];
corners.push_back(tl);
corners.push_back(tr);
corners.push_back(br);
corners.push_back(bl);
}
}
int main(int, char**)
{
Mat src, edges;
src = imread("15016889798859437.jpg");
cvtColor(src, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(5, 5), 1.5, 1.5);
erode(edges, edges, Mat());// these lines may need to be optimized
dilate(edges, edges, Mat());
dilate(edges, edges, Mat());
erode(edges, edges, Mat());
Canny(edges, edges, 50, 150, 3); // canny parameters may need to be optimized
imshow("edges", edges);
vector<Point> selected;
vector<vector<Point> > contours;
findContours(edges, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
Rect minRect = boundingRect(contours[i]);
if (minRect.width > 150 & minRect.height > 150) // this line also need to be optimized
{
selected.insert(selected.end(), contours[i].begin(), contours[i].end());
}
}
convexHull(selected, selected);
RotatedRect minRect = minAreaRect(selected);
std::vector<cv::Point> corner_points = extremePoints(selected);
std::vector<cv::Point2f> corners;
corners.push_back(corner_points[0]);
corners.push_back(corner_points[1]);
corners.push_back(corner_points[2]);
corners.push_back(corner_points[3]);
sortCorners(corners);
cv::Mat quad = cv::Mat::zeros(norm(corners[1] - corners[2]), norm(corners[2] - corners[3]), CV_8UC3);
std::vector<cv::Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts);
cv::warpPerspective(src, quad, transmtx, quad.size());
resize(quad, quad, Size(), 0.25, 0.25); // you can remove this line to keep the image original size
imshow("quad", quad);
polylines(src, selected, true, Scalar(0, 0, 255), 2);
resize(src, src, Size(), 0.5, 0.5); // you can remove this line to keep the image original size
imshow("result", src);
waitKey(0);
return 0;
}
---------------->
| | 4 | No.4 Revision |
EDIT: improved code. code (i used the references below).
http://web.archive.org/web/20150317011143/http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/
http://answers.opencv.org/question/64433
i get the result imageimages
---------------->
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
static std::vector<cv::Point> extremePoints(std::vector<cv::Point>pts)
{
int xmin = 0, ymin = 0, xmax = -1, ymax = -1, i;
Point ptxmin, ptymin, ptxmax, ptymax;
Point pt = pts[0];
ptxmin = ptymin = ptxmax = ptymax = pt;
xmin = xmax = pt.x;
ymin = ymax = pt.y;
for (size_t i = 1; i < pts.size(); i++)
{
pt = pts[i];
if (xmin > pt.x)
{
xmin = pt.x;
ptxmin = pt;
}
if (xmax < pt.x)
{
xmax = pt.x;
ptxmax = pt;
}
if (ymin > pt.y)
{
ymin = pt.y;
ptymin = pt;
}
if (ymax < pt.y)
{
ymax = pt.y;
ptymax = pt;
}
}
std::vector<cv::Point> res;
res.push_back(ptxmin);
res.push_back(ptxmax);
res.push_back(ptymin);
res.push_back(ptymax);
return res;
}
void sortCorners(std::vector<cv::Point2f>& corners)
{
std::vector<cv::Point2f> top, bot;
cv::Point2f center;
// Get mass center
for (int i = 0; i < corners.size(); i++)
center += corners[i];
center *= (1. / corners.size());
for (int i = 0; i < corners.size(); i++)
{
if (corners[i].y < center.y)
top.push_back(corners[i]);
else
bot.push_back(corners[i]);
}
corners.clear();
if (top.size() == 2 && bot.size() == 2) {
cv::Point2f tl = top[0].x > top[1].x ? top[1] : top[0];
cv::Point2f tr = top[0].x > top[1].x ? top[0] : top[1];
cv::Point2f bl = bot[0].x > bot[1].x ? bot[1] : bot[0];
cv::Point2f br = bot[0].x > bot[1].x ? bot[0] : bot[1];
corners.push_back(tl);
corners.push_back(tr);
corners.push_back(br);
corners.push_back(bl);
}
}
int main(int, char**)
{
Mat src, edges;
src = imread("15016889798859437.jpg");
cvtColor(src, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(5, 5), 1.5, 1.5);
erode(edges, edges, Mat());// these lines may need to be optimized
dilate(edges, edges, Mat());
dilate(edges, edges, Mat());
erode(edges, edges, Mat());
Canny(edges, edges, 50, 150, 3); // canny parameters may need to be optimized
imshow("edges", edges);
vector<Point> selected;
vector<vector<Point> > contours;
findContours(edges, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
Rect minRect = boundingRect(contours[i]);
if (minRect.width > 150 & minRect.height > 150) // this line also need to be optimized
{
selected.insert(selected.end(), contours[i].begin(), contours[i].end());
}
}
convexHull(selected, selected);
RotatedRect minRect = minAreaRect(selected);
std::vector<cv::Point> corner_points = extremePoints(selected);
std::vector<cv::Point2f> corners;
corners.push_back(corner_points[0]);
corners.push_back(corner_points[1]);
corners.push_back(corner_points[2]);
corners.push_back(corner_points[3]);
sortCorners(corners);
cv::Mat quad = cv::Mat::zeros(norm(corners[1] - corners[2]), norm(corners[2] - corners[3]), CV_8UC3);
std::vector<cv::Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts);
cv::warpPerspective(src, quad, transmtx, quad.size());
resize(quad, quad, Size(), 0.25, 0.25); // you can remove this line to keep the image original size
imshow("quad", quad);
polylines(src, selected, true, Scalar(0, 0, 255), 2);
resize(src, src, Size(), 0.5, 0.5); // you can remove this line to keep the image original size
imshow("result", src);
waitKey(0);
return 0;
}
| | 5 | No.5 Revision |
EDIT: EDIT2: improved code (i used the references below).reference below) code is still buggy
http://web.archive.org/web/20150317011143/http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/
http://answers.opencv.org/question/64433
i get the result images
---------------->
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
static bool lineIntersection(const cv::Point2f &a1, const cv::Point2f &b1, const cv::Point2f &a2,
const cv::Point2f &b2, cv::Point2f &intersection) {
double A1 = b1.y - a1.y;
double B1 = a1.x - b1.x;
double C1 = (a1.x * A1) + (a1.y * B1);
double A2 = b2.y - a2.y;
double B2 = a2.x - b2.x;
double C2 = (a2.x * A2) + (a2.y * B2);
double det = (A1 * B2) - (A2 * B1);
if (true) { //if (!almostEqual(det, 0))
intersection.x = static_cast<float>(((C1 * B2) - (C2 * B1)) / (det));
intersection.y = static_cast<float>(((C2 * A1) - (C1 * A2)) / (det));
return true;
}
return false;
}
struct vector_sorter
{
bool operator ()(const std::vector<cv::Point>& a, const std::vector<cv::Point> extremePoints(std::vector<cv::Point>pts)
{
int xmin = 0, ymin = 0, xmax = -1, ymax = -1, i;
Point ptxmin, ptymin, ptxmax, ptymax;
Point pt = pts[0];
ptxmin = ptymin = ptxmax = ptymax = pt;
xmin = xmax = pt.x;
ymin = ymax = pt.y;
for (size_t i = 1; i < pts.size(); i++)
{
pt = pts[i];
if (xmin & b)
{
double dist_a = norm(a[0] - a[1]);
double dist_b = norm(b[0] - b[1]);
return dist_a > pt.x)
{
xmin = pt.x;
ptxmin = pt;
}
if (xmax < pt.x)
{
xmax = pt.x;
ptxmax = pt;
}
if (ymin > pt.y)
{
ymin = pt.y;
ptymin = pt;
}
if (ymax < pt.y)
{
ymax = pt.y;
ptymax = pt;
}
}
std::vector<cv::Point> res;
res.push_back(ptxmin);
res.push_back(ptxmax);
res.push_back(ptymin);
res.push_back(ptymax);
return res;
}
dist_b;
}
};
void sortCorners(std::vector<cv::Point2f>& corners)
{
std::vector<cv::Point2f> top, bot;
cv::Point2f center;
// Get mass center
for (int i = 0; i < corners.size(); i++)
center += corners[i];
center *= (1. / corners.size());
for (int i = 0; i < corners.size(); i++)
{
if (corners[i].y < center.y)
top.push_back(corners[i]);
else
bot.push_back(corners[i]);
}
corners.clear();
if (top.size() == 2 && bot.size() == 2) {
cv::Point2f tl = top[0].x > top[1].x ? top[1] : top[0];
cv::Point2f tr = top[0].x > top[1].x ? top[0] : top[1];
cv::Point2f bl = bot[0].x > bot[1].x ? bot[1] : bot[0];
cv::Point2f br = bot[0].x > bot[1].x ? bot[0] : bot[1];
corners.push_back(tl);
corners.push_back(tr);
corners.push_back(br);
corners.push_back(bl);
}
}
static std::vector<cv::Point2f> extremePoints(std::vector<cv::Point>pts)
{
convexHull(pts, pts);
vector<vector<Point> > lines;
vector<Point> line_pts;
line_pts.push_back(pts[0]);
line_pts.push_back(pts[pts.size()-1]);
lines.push_back(line_pts);
line_pts.clear();
for (size_t i = 1; i < pts.size(); i++)
{
line_pts.push_back(pts[i]);
line_pts.push_back(pts[i-1]);
lines.push_back(line_pts);
line_pts.clear();
}
sort(lines.begin(), lines.end(), vector_sorter());
Point2f intersection, vtx[4];
std::vector<cv::Point2f> corners;
for (int i = 0; i < 4; i++)
{
for (int j = i + 1; j < 4; j++)
{
lineIntersection(lines[i][0], lines[i][1], lines[j][0], lines[j][1], intersection);
if (intersection.x >= 0 && intersection.y >= 0)
corners.push_back(intersection);
}
}
sortCorners(corners);
return corners;
}
int main(int, char**)
main(int argc, char** argv)
{
Mat src, edges;
src = imread("15016889798859437.jpg");
imread(argv[1]);
cvtColor(src, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(5, 5), 1.5, 1.5);
erode(edges, edges, Mat());// these lines may need to be optimized
dilate(edges, edges, Mat());
dilate(edges, edges, Mat());
erode(edges, edges, Mat());
Canny(edges, edges, 50, 150, 3); // canny parameters may need to be optimized
imshow("edges", edges);
vector<Point> selected;
vector<vector<Point> > contours;
findContours(edges, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
Rect minRect = boundingRect(contours[i]);
if (minRect.width > 150 & minRect.height > 150) // this line also need to be optimized
{
selected.insert(selected.end(), contours[i].begin(), contours[i].end());
}
}
convexHull(selected, selected);
RotatedRect minRect = minAreaRect(selected);
std::vector<cv::Point> corner_points std::vector<cv::Point2f> corners = extremePoints(selected);
std::vector<cv::Point2f> corners;
corners.push_back(corner_points[0]);
corners.push_back(corner_points[1]);
corners.push_back(corner_points[2]);
corners.push_back(corner_points[3]);
sortCorners(corners);
Rect r = boundingRect(corners);
cv::Mat quad = cv::Mat::zeros(norm(corners[1] - corners[2]), norm(corners[2] - corners[3]), CV_8UC3);
std::vector<cv::Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts);
cv::warpPerspective(src, quad, transmtx, quad.size());
resize(quad, quad, Size(), 0.25, 0.25); // you can remove this line to keep the image original size
imshow("quad", quad);
polylines(src, selected, true, Scalar(0, 0, 255), 2);
resize(src, src, Size(), 0.5, 0.5); // you can remove this line to keep the image original size
imshow("result", src);
waitKey(0);
return 0;
}
| | 6 | No.6 Revision |
EDIT3: Probably i solved the problem on my last change
 ------------>
------------> 
EDIT2: improved code (i used the reference below) code is still buggy
http://web.archive.org/web/20150317011143/http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/
i get the result images
---------------->
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
#define EPSILON 1E-5
//! Return the maximum of the provided numbers
static double maximum(double number1, double number2, double number3) {
return std::max(std::max(number1, number2), number3);
}
//! Check if the two numbers are equal (almost)
/*!
* The expression for determining if two real numbers are equal is:
* if (Abs(x - y) <= EPSILON * Max(1.0f, Abs(x), Abs(y))).
*
* @param number1 First number
* @param number2 Second number
*/
static bool almostEqual(double number1, double number2) {
return (std::abs(number1 - number2) <= (EPSILON * maximum(1.0, std::abs(number1), std::abs(number2))));
}
//! Determine the intersection point of two lines, if this point exists
/*! Two lines intersect if they are not parallel (Parallel lines intersect at
* +/- infinity, but we do not consider this case here).
*
* The lines are specified by a pair of points each. If they intersect, then
* the function returns true, else it returns false.
*
* Lines can be specified in the following form:
* A1x + B1x = C1
* A2x + B2x = C2
*
* If det (= A1*B2 - A2*B1) == 0, then lines are parallel
* else they intersect
*
* If they intersect, then let us denote the intersection point with P(x, y) where:
* x = (C1*B2 - C2*B1) / (det)
* y = (C2*A1 - C1*A2) / (det)
*
* @param a1 First point for determining the first line
* @param b1 Second point for determining the first line
* @param a2 First point for determining the second line
* @param b2 Second point for determining the second line
* @param intersection The intersection point, if this point exists
*/
static bool lineIntersection(const cv::Point2f &a1, const cv::Point2f &b1, const cv::Point2f &a2,
const cv::Point2f &b2, cv::Point2f &intersection) {
double A1 = b1.y - a1.y;
double B1 = a1.x - b1.x;
double C1 = (a1.x * A1) + (a1.y * B1);
double A2 = b2.y - a2.y;
double B2 = a2.x - b2.x;
double C2 = (a2.x * A2) + (a2.y * B2);
double det = (A1 * B2) - (A2 * B1);
if (true) { //if (!almostEqual(det, 0))
0)) {
intersection.x = static_cast<float>(((C1 * B2) - (C2 * B1)) / (det));
intersection.y = static_cast<float>(((C2 * A1) - (C1 * A2)) / (det));
return true;
}
return false;
}
struct vector_sorter
{
bool operator ()(const std::vector<cv::Point>& a, const std::vector<cv::Point> & b)
{
double dist_a = norm(a[0] - a[1]);
double dist_b = norm(b[0] - b[1]);
return dist_a > dist_b;
}
};
void sortCorners(std::vector<cv::Point2f>& corners)
{
std::vector<cv::Point2f> top, bot;
cv::Point2f center;
// Get mass center
for (int i = 0; i < corners.size(); i++)
center += corners[i];
center *= (1. / corners.size());
for (int i = 0; i < corners.size(); i++)
{
if (corners[i].y < center.y)
top.push_back(corners[i]);
else
bot.push_back(corners[i]);
}
corners.clear();
if (top.size() == 2 && bot.size() == 2) {
cv::Point2f tl = top[0].x > top[1].x ? top[1] : top[0];
cv::Point2f tr = top[0].x > top[1].x ? top[0] : top[1];
cv::Point2f bl = bot[0].x > bot[1].x ? bot[1] : bot[0];
cv::Point2f br = bot[0].x > bot[1].x ? bot[0] : bot[1];
corners.push_back(tl);
corners.push_back(tr);
corners.push_back(br);
corners.push_back(bl);
}
}
static std::vector<cv::Point2f> extremePoints(std::vector<cv::Point>pts)
{
convexHull(pts, pts);
vector<vector<Point> > lines;
vector<Point> line_pts;
line_pts.push_back(pts[0]);
line_pts.push_back(pts[pts.size()-1]);
lines.push_back(line_pts);
line_pts.clear();
for (size_t i = 1; i < pts.size(); i++)
{
line_pts.push_back(pts[i]);
line_pts.push_back(pts[i-1]);
lines.push_back(line_pts);
line_pts.clear();
}
sort(lines.begin(), lines.end(), vector_sorter());
Point2f intersection, vtx[4];
std::vector<cv::Point2f> corners;
for (int i = 0; i < 4; i++)
{
for (int j = i + 1; j < 4; j++)
{
lineIntersection(lines[i][0], lines[i][1], lines[j][0], lines[j][1], intersection);
if (intersection.x >= 0 && intersection.y >= 0)
corners.push_back(intersection);
}
}
sortCorners(corners);
return corners;
}
int main(int argc, char** argv)
{
Mat src, edges;
src = imread(argv[1]);
cvtColor(src, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(5, 5), 1.5, 1.5);
erode(edges, edges, Mat());// these lines may need to be optimized
dilate(edges, edges, Mat());
dilate(edges, edges, Mat());
erode(edges, edges, Mat());
Canny(edges, edges, 50, 150, 3); // canny parameters may need to be optimized
imshow("edges", edges);
vector<Point> selected;
selected_points;
vector<vector<Point> > contours;
findContours(edges, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
Rect minRect = boundingRect(contours[i]);
if (minRect.width > 150 & minRect.height > 150) // this line also need to be optimized
{
selected.insert(selected.end(), selected_points.insert(selected_points.end(), contours[i].begin(), contours[i].end());
}
}
vector<Point2f> selected_points_f;
vector<Point2f> corners;
Mat(selected_points).convertTo(selected_points_f, CV_32F);
Mat hull;
convexHull(selected_points_f, hull, true, true);
RotatedRect RRect = minAreaRect(hull);
std::vector<cv::Point2f> corners = extremePoints(selected);
RR_corners;
Point2f four_points[4];
RRect.points(four_points);
RR_corners.push_back(four_points[0]);
RR_corners.push_back(four_points[1]);
RR_corners.push_back(four_points[2]);
RR_corners.push_back(four_points[3]);
for (int j = 0; j < 4; j++)
{
Point2f pt = RR_corners[j];
Point2f nearest_pt = hull.at<Point2f>(j,0);
float dist = norm(pt - nearest_pt);
for (int k = 1; k < hull.rows; k++)
{
Point2f hull_point = hull.at<Point2f>(k, 0);
if (norm(pt - hull_point) < dist)
{
dist = norm(pt - hull_point);
nearest_pt = hull_point;
}
}
corners.push_back(nearest_pt);
}
sortCorners(corners);
Mat(corners).convertTo(selected_points, CV_32S);
Rect r = boundingRect(corners);
cv::Mat quad = cv::Mat::zeros(norm(corners[1] - corners[2]), norm(corners[2] - corners[3]), CV_8UC3);
std::vector<cv::Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts);
cv::warpPerspective(src, quad, transmtx, quad.size());
imshow("quad", polylines(src, selected_points, true, Scalar(0, 0, 255), 3);
imshow("Source Image", src);
imshow("Result Image", quad);
waitKey(0);
return 0;
}
| | 7 | No.7 Revision |
EDIT3: Probably i solved the problem on my last change
------------>
EDIT2: improved code (i used the reference below) code is still buggy
http://web.archive.org/web/20150317011143/http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/
i get the result images
---------------->
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
#define EPSILON 1E-5
//! Return the maximum of the provided numbers
static double maximum(double number1, double number2, double number3) {
return std::max(std::max(number1, number2), number3);
}
//! Check if the two numbers are equal (almost)
/*!
* The expression for determining if two real numbers are equal is:
* if (Abs(x - y) <= EPSILON * Max(1.0f, Abs(x), Abs(y))).
*
* @param number1 First number
* @param number2 Second number
*/
static bool almostEqual(double number1, double number2) {
return (std::abs(number1 - number2) <= (EPSILON * maximum(1.0, std::abs(number1), std::abs(number2))));
}
//! Determine the intersection point of two lines, if this point exists
/*! Two lines intersect if they are not parallel (Parallel lines intersect at
* +/- infinity, but we do not consider this case here).
*
* The lines are specified by a pair of points each. If they intersect, then
* the function returns true, else it returns false.
*
* Lines can be specified in the following form:
* A1x + B1x = C1
* A2x + B2x = C2
*
* If det (= A1*B2 - A2*B1) == 0, then lines are parallel
* else they intersect
*
* If they intersect, then let us denote the intersection point with P(x, y) where:
* x = (C1*B2 - C2*B1) / (det)
* y = (C2*A1 - C1*A2) / (det)
*
* @param a1 First point for determining the first line
* @param b1 Second point for determining the first line
* @param a2 First point for determining the second line
* @param b2 Second point for determining the second line
* @param intersection The intersection point, if this point exists
*/
static bool lineIntersection(const cv::Point2f &a1, const cv::Point2f &b1, const cv::Point2f &a2,
const cv::Point2f &b2, cv::Point2f &intersection) {
double A1 = b1.y - a1.y;
double B1 = a1.x - b1.x;
double C1 = (a1.x * A1) + (a1.y * B1);
double A2 = b2.y - a2.y;
double B2 = a2.x - b2.x;
double C2 = (a2.x * A2) + (a2.y * B2);
double det = (A1 * B2) - (A2 * B1);
if (!almostEqual(det, 0)) {
intersection.x = static_cast<float>(((C1 * B2) - (C2 * B1)) / (det));
intersection.y = static_cast<float>(((C2 * A1) - (C1 * A2)) / (det));
return true;
}
return false;
}
struct vector_sorter
{
bool operator ()(const std::vector<cv::Point>& a, const std::vector<cv::Point> & b)
{
double dist_a = norm(a[0] - a[1]);
double dist_b = norm(b[0] - b[1]);
return dist_a > dist_b;
}
};
void sortCorners(std::vector<cv::Point2f>& corners)
{
std::vector<cv::Point2f> top, bot;
cv::Point2f center;
// Get mass center
for (int i = 0; i < corners.size(); i++)
center += corners[i];
center *= (1. / corners.size());
for (int i = 0; i < corners.size(); i++)
{
if (corners[i].y < center.y)
top.push_back(corners[i]);
else
bot.push_back(corners[i]);
}
corners.clear();
if (top.size() == 2 && bot.size() == 2) {
cv::Point2f tl = top[0].x > top[1].x ? top[1] : top[0];
cv::Point2f tr = top[0].x > top[1].x ? top[0] : top[1];
cv::Point2f bl = bot[0].x > bot[1].x ? bot[1] : bot[0];
cv::Point2f br = bot[0].x > bot[1].x ? bot[0] : bot[1];
corners.push_back(tl);
corners.push_back(tr);
corners.push_back(br);
corners.push_back(bl);
}
}
int main(int argc, char** argv)
{
Mat src, edges;
src = imread(argv[1]);
cvtColor(src, edges, COLOR_BGR2GRAY);
GaussianBlur(edges, edges, Size(5, 5), 1.5, 1.5);
erode(edges, edges, Mat());// these lines may need to be optimized
dilate(edges, edges, Mat());
dilate(edges, edges, Mat());
erode(edges, edges, Mat());
Canny(edges, edges, 50, 150, 3); // canny parameters may need to be optimized
imshow("edges", edges);
vector<Point> selected_points;
vector<vector<Point> > contours;
findContours(edges, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
for (size_t i = 0; i < contours.size(); i++)
{
Rect minRect = boundingRect(contours[i]);
if ( (minRect.width > 150 & minRect.height src.cols / 6) | (minRect.height > 150) src.rows / 6) ) // this line also need to be optimized
{
selected_points.insert(selected_points.end(), contours[i].begin(), contours[i].end());
}
}
vector<Point2f> selected_points_f;
vector<Point2f> corners;
Mat(selected_points).convertTo(selected_points_f, CV_32F);
Mat hull;
convexHull(selected_points_f, hull, true, true);
RotatedRect RRect = minAreaRect(hull);
std::vector<cv::Point2f> RR_corners;
Point2f four_points[4];
RRect.points(four_points);
RR_corners.push_back(four_points[0]);
RR_corners.push_back(four_points[1]);
RR_corners.push_back(four_points[2]);
RR_corners.push_back(four_points[3]);
for (int j = 0; j < 4; j++)
{
Point2f pt = RR_corners[j];
Point2f nearest_pt = hull.at<Point2f>(j,0);
float dist = norm(pt - nearest_pt);
for (int k = 1; k < hull.rows; k++)
{
Point2f hull_point = hull.at<Point2f>(k, 0);
if (norm(pt - hull_point) < dist)
{
dist = norm(pt - hull_point);
nearest_pt = hull_point;
}
}
corners.push_back(nearest_pt);
}
sortCorners(corners);
Mat(corners).convertTo(selected_points, CV_32S);
Rect r = boundingRect(corners);
cv::Mat quad = cv::Mat::zeros(norm(corners[1] - corners[2]), norm(corners[2] - corners[3]), CV_8UC3);
std::vector<cv::Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows));
cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts);
cv::warpPerspective(src, quad, transmtx, quad.size());
polylines(src, selected_points, true, Scalar(0, 0, 255), 3);
imshow("Source Image", src);
imshow("Result Image", quad);
waitKey(0);
return 0;
}
| | 8 | No.8 Revision |
EDIT3: Probably i solved the problem on my last change
------------>
EDIT2: improved code (i used the reference below) code is still buggy
http://web.archive.org/web/20150317011143/http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/
i get the result images
---------------->
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include <iostream>
you can find my trial C++ source code on github
| | 9 | No.9 Revision |
EDIT3: Probably i solved the problem on my last change
------------>
EDIT2: improved code (i used the reference below) code is still buggy
http://web.archive.org/web/20150317011143/http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/
i get the result images
---------------->
you can find my trial C++ source code on githubgithub for getting some result images below
------------>
---------------->
used referencess:
http://study.marearts.com/2015/03/image-warping-using-opencv.html http://web.archive.org/web/20150317011143/http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/
| | 10 | No.10 Revision |
you can find my trial C++ source code on github for getting some result images below
------------>
---------------->
used referencess:
http://study.marearts.com/2015/03/image-warping-using-opencv.html
http://study.marearts.com/2015/03/image-warping-using-opencv.html http://web.archive.org/web/20150317011143/http://opencv-code.com/tutorials/automatic-perspective-correction-for-quadrilateral-objects/
