If I start at the origin and use triangulatePoints the result looks like expected; These are the poses of the cameras [R|t]
p0: [1, 0, 0, 0;
0, 1, 0, 0;
0, 0, 1, 0]
P1: [0.9999726146107655, -0.0007533190856300971, -0.007362237354563941, 0.9999683127209806;
0.0007569149205790131, 0.9999995956157767, 0.0004856419317479311, -0.001340876868928852;
0.007361868534054914, -0.0004912012195572309, 0.9999727804360723, 0.007847012372698725]
I get results that look as expected to me:

When I rotate the first camera by 45 degrees and then use recoverPose to get the relative pose of the second camera the results are wrong.
Pose matrices where P0 is rotated by 45 degrees before calling
P0: [0.5253219888177297, 0, 0.8509035245341184, 0;
0, 1, 0, 0;
-0.8509035245341184, 0, 0.5253219888177297, 0]
P1: [0.5315721563840478, -0.0007533190856300971, 0.8470126770406503, 0.5319823932782873;
-1.561037994149129e-05, 0.9999995956157767, 0.0008991799591322519, -0.001340876868928852;
-0.8470130118915117, -0.0004912012195572309, 0.5315719296650566, -0.8467543535708145]

The pose of the second frame is calculated as follows:
new_frame->E = cv::findEssentialMat(last_frame->points, new_frame->points, K, cv::RANSAC, 0.999, 1.0, new_frame->mask);
int res = recoverPose(new_frame->E, last_frame->points, new_frame->points, K, new_frame->local_R, new_frame->local_t, new_frame->mask);
// https://stackoverflow.com/questions/37810218/is-the-recoverpose-function-in-opencv-is-left-handed
new_frame->local_t = -new_frame->local_t;
new_frame->local_R = new_frame->local_R.t();
hconcat(new_frame->local_R, new_frame->local_t, new_frame->local_pose);
new_frame->pose_t = last_frame->pose_t + (last_frame->pose_R * new_frame->local_t);
new_frame->pose_R = new_frame->local_R * last_frame->pose_R;
hconcat(new_frame->pose_R, new_frame->pose_t, new_frame->pose);
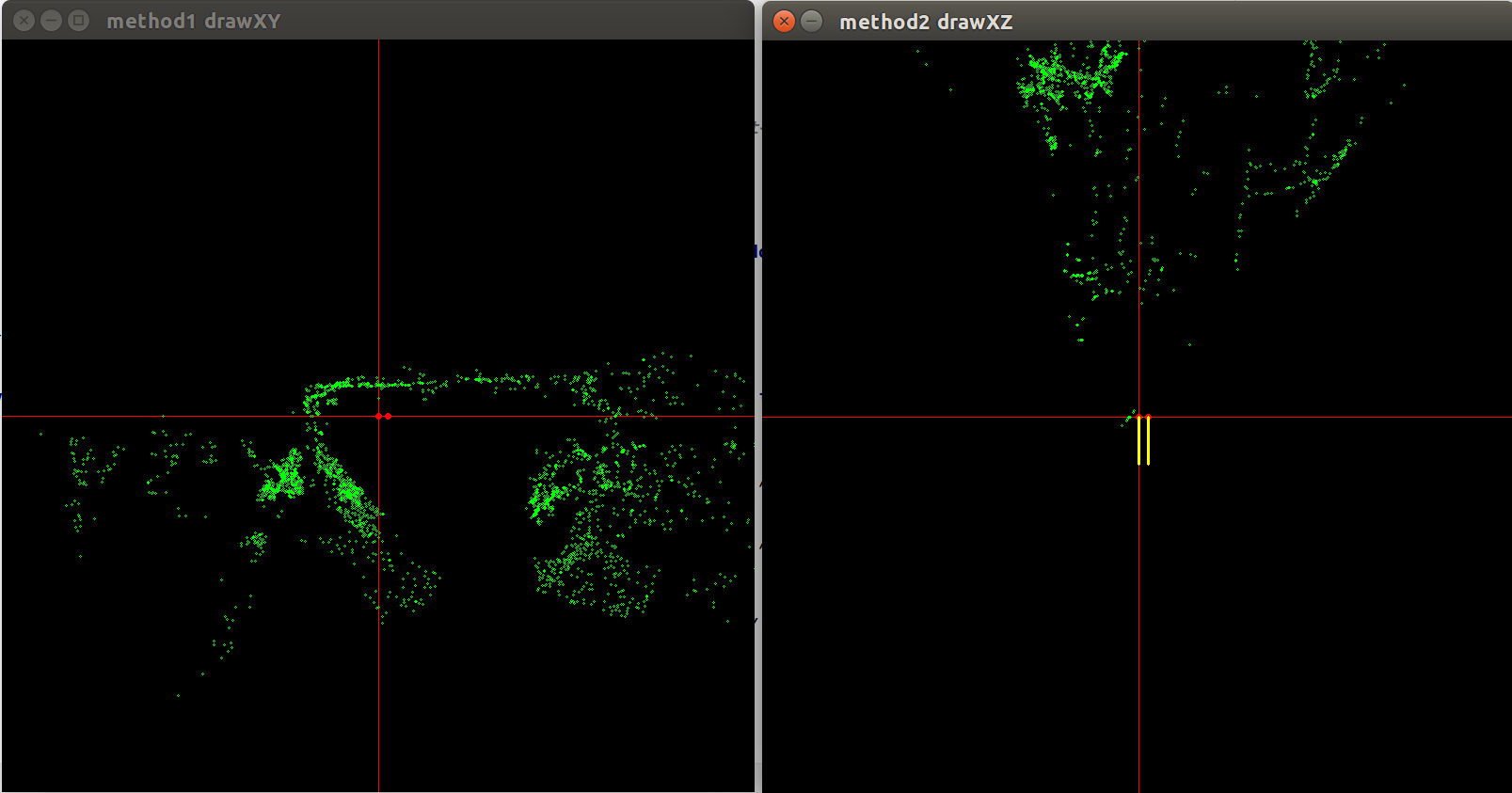
I then call triangulatePoints using the K * P0 and K*P1 on the corresponding points.
I feel like this is some kind of coordinate system issue as the points I would expect to have positive z values have a -z value in the plots.