I have the following class that uses the android camera to capture an information to make a match of another image using opencv 3.1 with surf.
public class MyCameraPreview implements SurfaceHolder.Callback, Camera.PreviewCallback {
private Camera mCamera = null;
private ImageView ivCameraPreview = null;
private int[] pixels;
private Mat matFrameCamera;
private Mat matFrameOutputCamera;
private Mat mRgba2Gray;
private int imageFormat;
private int previewSizeWidth;
private int previewSizeHeight;
private boolean bProcessing = false;
private int totalFrames = 0;
private int totalProcFrames = 0;
private Mat matTarget;
private Bitmap bmpFixedImage;
private Bitmap bitmap;
private Handler mHandler = new Handler(Looper.getMainLooper());
private Context context;
private boolean findFeaturesMatch;
private boolean surfCompletedWithMatcher;
private boolean stop;
MyCameraPreview(int previewLayoutWidth, int previewLayoutHeight,
ImageView ivCameraPreview, Context context) {
previewSizeWidth = previewLayoutWidth;
previewSizeHeight = previewLayoutHeight;
this.ivCameraPreview = ivCameraPreview;
this.context = context;
try {
matTarget = Utils.loadResource(context, R.drawable.outback, Imgcodecs.CV_LOAD_IMAGE_GRAYSCALE);
} catch (IOException e) {
e.printStackTrace();
}
}
@Override
public void onPreviewFrame(byte[] arg0, Camera arg1) { }
void onPause() {
mCamera.stopPreview();
}
@Override
public void surfaceChanged(SurfaceHolder arg0, int arg1, int arg2, int arg3) {
Camera.Parameters parameters = mCamera.getParameters();
matFrameCamera = new Mat(previewSizeHeight + (previewSizeHeight / 2), previewSizeWidth, CvType.CV_8UC1);
matFrameOutputCamera = new Mat(previewSizeHeight, previewSizeWidth, CvType.CV_8UC4);
Camera.Size size = parameters.getPreviewSize();
previewSizeHeight = size.height;
previewSizeWidth = size.width;
// Set the camera preview size
parameters.setPreviewSize(previewSizeWidth, previewSizeHeight);
imageFormat = parameters.getPreviewFormat();
mCamera.setParameters(parameters);
mCamera.startPreview();
mCamera.setPreviewCallback(new Camera.PreviewCallback() {
public void onPreviewFrame(final byte[] data, final Camera camera) {
synchronized (this) {
totalFrames++;
if (imageFormat == ImageFormat.NV21) {
//We only accept the NV21(YUV420) format.
if (!bProcessing) {
totalProcFrames++;
matFrameCamera.put(0, 0, data);
mRgba2Gray = new Mat();
Imgproc.cvtColor(matFrameCamera, mRgba2Gray, Imgproc.COLOR_YUV420sp2GRAY);
mHandler.post(doImageProcessing);
}
}
this.notify();
}
}
});
}
@Override
public void surfaceCreated(SurfaceHolder arg0) {
mCamera = Camera.open();
try {
// If did not set the SurfaceHolder, the preview area will be black.
mCamera.setPreviewDisplay(arg0);
mCamera.setDisplayOrientation(90);
mCamera.setPreviewCallback(this);
} catch (IOException e) {
mCamera.release();
mCamera = null;
}
}
@Override
public void surfaceDestroyed(SurfaceHolder arg0) {
mCamera.setPreviewCallback(null);
mCamera.stopPreview();
mCamera.release();
mRgba2Gray.release();
matFrameCamera.release();
matFrameOutputCamera.release();
matTarget.release();
mCamera = null;
}
//
// Native JNI
//
public native void SurfMatcher(long matAddrFrameCamera, long matAddrFeature,
long matAddrMatch);
static {
System.loadLibrary("native");
}
private Runnable doImageProcessing = new Runnable() {
public void run() {
if(!stop) {
bProcessing = true;
int bitmapWidth = mRgba2Gray.cols() + matTarget.cols();
int bitmapHeight = mRgba2Gray.rows() > matTarget.rows() ? mRgba2Gray.rows() : matTarget.rows();
Mat matImageMatcher = new Mat(mRgba2Gray.rows(), bitmapWidth, CvType.CV_8UC1);
SurfMatcher(mRgba2Gray.getNativeObjAddr(), matTarget.getNativeObjAddr(),
matImageMatcher.getNativeObjAddr());
bitmap = Bitmap.createBitmap(bitmapWidth, bitmapHeight,
Bitmap.Config.ARGB_8888);
Utils.matToBitmap(matImageMatcher, bitmap);
ivCameraPreview.setImageBitmap(bitmap);
stop = true;
bProcessing = false;
}
}
};
}
By making the image match the result is coming distorted (left image is camera frame and right is image target).
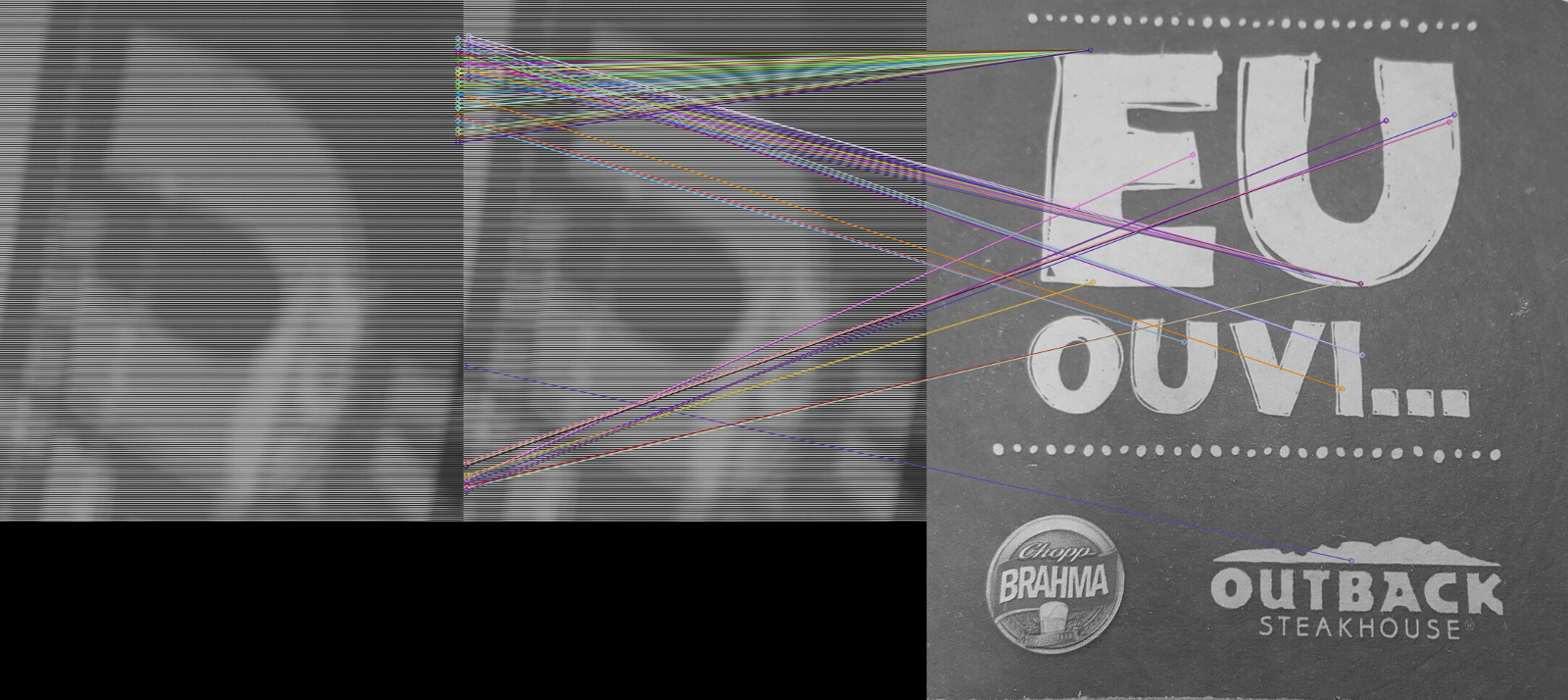 I made the following test to show only the camera preview (mRgba2Gray variable) and this ok.
I made the following test to show only the camera preview (mRgba2Gray variable) and this ok.