Hi , I wanna get some advices here to improve the accuracy of stereocalibrate().
I calibrate my cameras very succesfuly , with rms <0.3 , but when I use the same images to do stereocalibrate, I get a very large rms.
my result of my experiment is as follow.
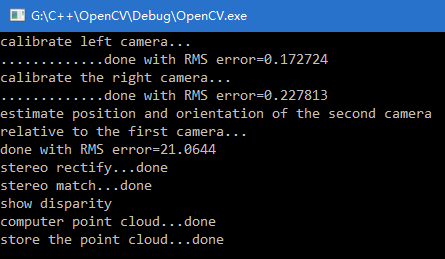
so is there someone can give me some tips to improve my stereo calibration's result.
thx ->..<-
Updata:
I run stereoCalibrate() using those parameters,
stereoCalibrate(ObjectPoints, imagePointsFirst, imagePointsSec,
intrMatFirst, distCoeffsFirst, intrMatSec, distCoffesSec,
imageSize, R, T, E, F, CV_CALIB_FIX_INTRINSIC,
TermCriteria(TermCriteria::COUNT + TermCriteria::EPS, 30, 1e-6));
and calibrate each camera like this,
calibrateCamera(ObjectPoints, imagePoints, imageSize, intrMat, distCoeffs,
rvecs, tvecs);
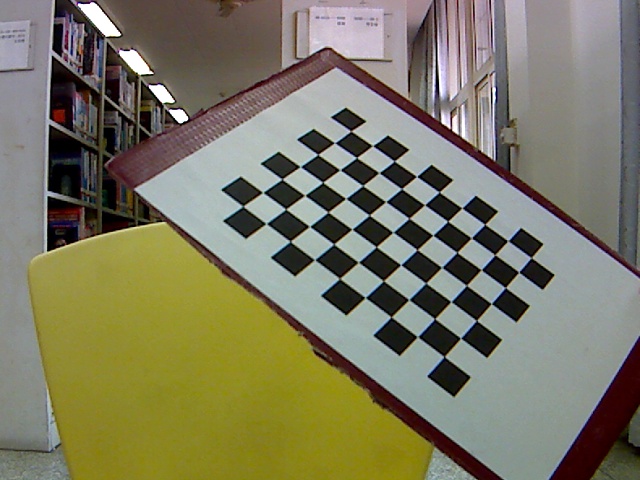
and those are parts of my images used for calibrating.

update 2:
I grab the images for calibrating the two cameras at the same time. So dose the images used for stereo calibrations.
