Hello. I am trying to make cloud point from pair of images.
I am using StereoBM to create disparity map, but results is very, very bad.
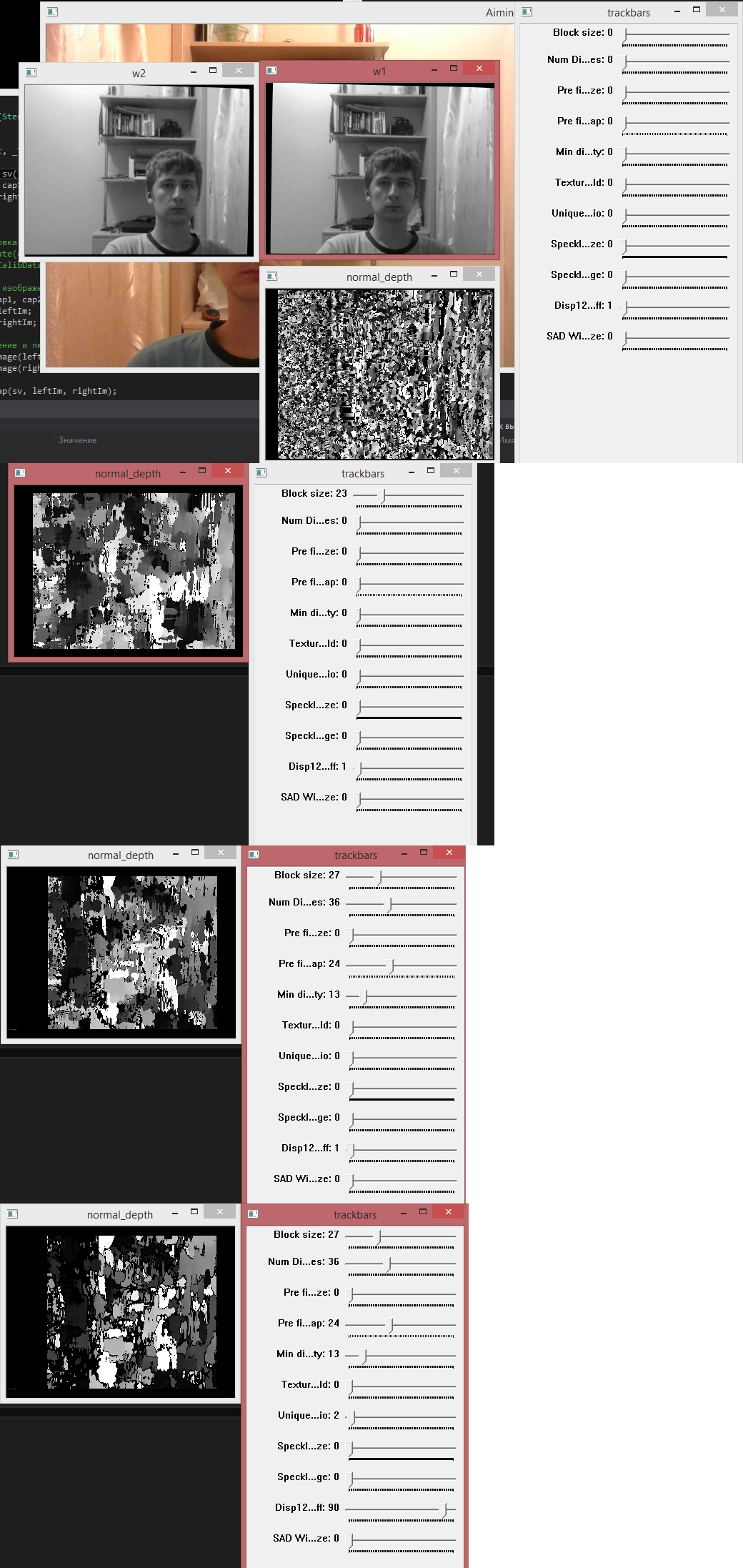
I see lot of tutorials, such this, but I can't create good disparity map. I also trying to use StereoSGBM, but results is same. My images are rectified well and this is a pruf (it's an optical flow from stereo images, all lines are horizontal)

How can I do good disparity map? Hope you'll help.
P.S.
- I can't find SADWindowSize in StereoBM.
- I heared about Graph Cut algorytm, but I can't find it in OpenCV.