Hi,
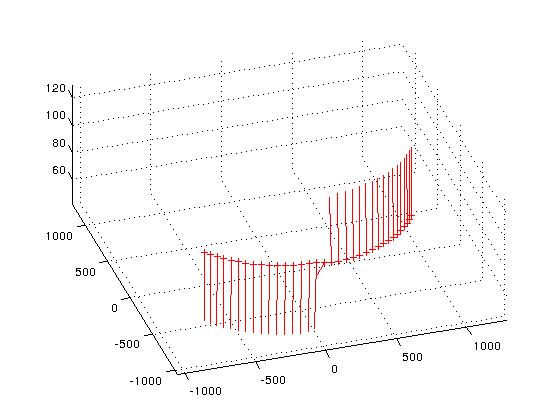
I'm using OpenCV's camera calibration function, I have 34 images of the checkerboard on a turntable, taken from a static camera. The camera position from the initial tvec is approximately correct, however the rvec is totally wrong. I ploted the orientation in matlab to indicate the problem.
{kind=link}
The formula I used should be correct like,this.
My question is why these orientations are wrong ? is this normal for the calibration algorithm? Matlab uses Z as the up axis, could this be my visualization code problem ?
Thanks.