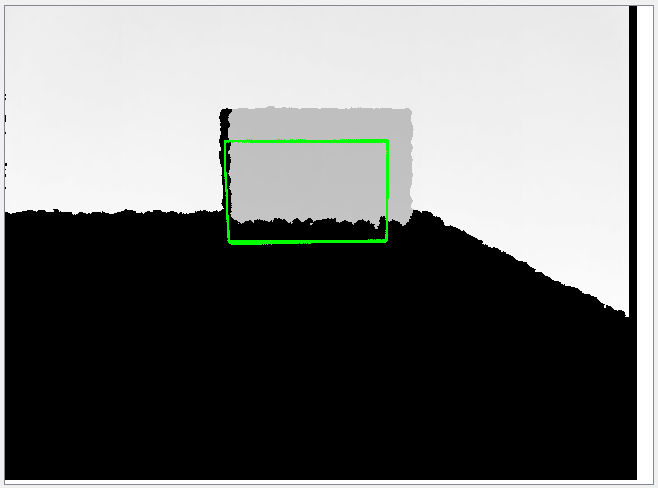
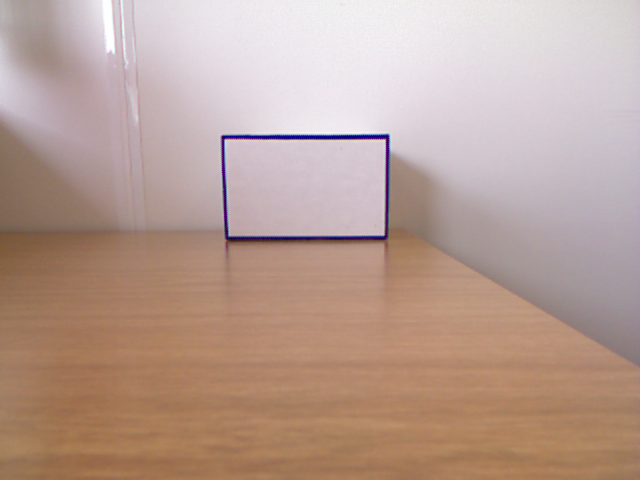
Hi i captured with Kinect a box on the table. I colored the edge so i can project a binarized rgb image into a depth image. (see images below) As you can see there rgb and depth image are not equal.
Question: i want to select 4 corners on rgb image and 4 corners on depth image. is there any opencv function to calculate Translation/Rotation Matrix by using these informations?
thx
Kinect-RGB
Kinect-Depth