I am testing findChessboardCornersSB as an alternative to **findChessboardCorners', mainly to be able to use a calibration target which may overlap the image boundaries. While it works like expected in many cases, I always encounter strange detection misses and spurious detections:

and:
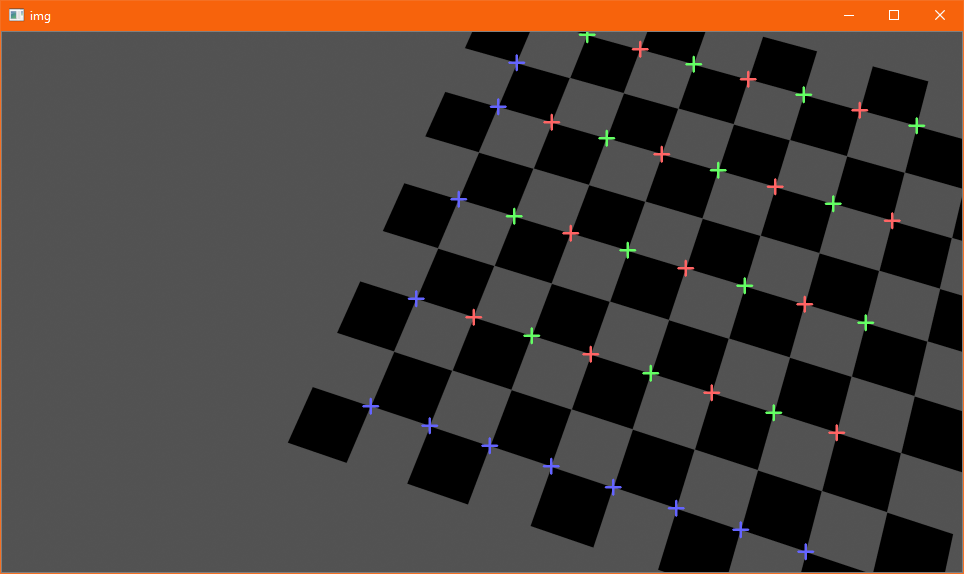
even if I ignore the missed points in between, I would have no idea how to associate the detected points with their world coordinates.
Am I doing something wrong, or is findChessboardCornersSB unstable?
Here's the code:
import cv2
import numpy as np
import os
import glob
# Defining the dimensions of checkerboard
CHECKERBOARD = (5, 5)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 500, 0.0001)
# Creating vector to store vectors of 3D points for each checkerboard image
objpoints = []
# Creating vector to store vectors of 2D points for each checkerboard image
imgpoints = []
colortable = [(255, 100, 100), (100, 255, 100), (100, 100, 255)]
# Defining the world coordinates for 3D points
objp = np.zeros((1, CHECKERBOARD[0] * CHECKERBOARD[1], 3), np.float32)
objp[0, :, :2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
prev_img_shape = None
# Extracting path of individual image stored in a given directory
images = glob.glob('./square/*.png')
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, corners, meta = cv2.findChessboardCornersSBWithMeta(img, CHECKERBOARD,
cv2.CALIB_CB_LARGER )
if ret == True:
objpoints.append(objp)
imgpoints.append(corners)
# Draw and display the corners
cv2.convertScaleAbs(img, img, 0.4, 0.0)
for corner, m in zip(corners, meta.ravel()):
color = colortable[m]
cv2.drawMarker( img, (corner[0][0], corner[0][1]), color, cv2.MARKER_CROSS, 30, 3)
else:
print("not found")
cv2.imshow('img',cv2.resize(img, (0, 0), None, 0.5, 0.5))
if (cv2.waitKey(0) == 27):
break;
cv2.destroyAllWindows()