i am currently working on stereo processing using opencv2.3 and a Pointgrey Bumblebee2 stereocamera as an input device. Acquiring images is done via the libdc1394.
My code for rectification and stereo processing is the following:
void StereoProcessing::calculateDisparityMap(const Mat &left, const Mat &right, Mat &disparity_map)
Mat map11, map12, map21, map22, left_rectified, right_rectified, disp16;
// Computes the undistortion and rectification transformation maps
initUndistortRectifyMap(this->camera_matrix1,
this->distance_coefficients1,
this->R1,
this->P1,
this->output_image_size,
CV_16SC2,
map11,
map12);
initUndistortRectifyMap(this->camera_matrix2,
this->distance_coefficients2,
this->R2,
this->P2,
this->output_image_size,
CV_16SC2,
map21,
map22);
// creates rectified images
remap(left, left_rectified, map11, map12, INTER_LINEAR);
remap(right, right_rectified, map21, map22, INTER_LINEAR);
// calculates 16-bit disparitymap
this->stereo_bm(left_temp, right_temp, disp16);
disp16.convertTo(disparity_map, CV_8U, 255 / (this->stereo_bm.state->numberOfDisparities * 16.0));
}
This works fine except for a black left border in the disparity map, which is the following:
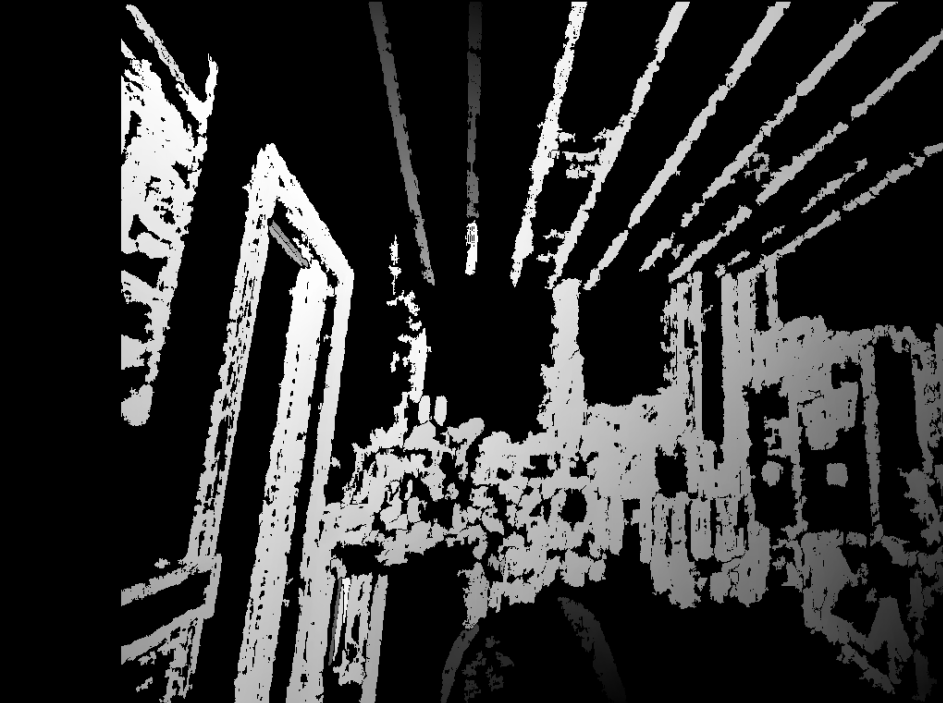
The input images are these two - unrectified as you can see ;) :


So my question is now: Is this normal behaviour? Or do you see any mistake i have done so far? As another information, the rectification works fine.