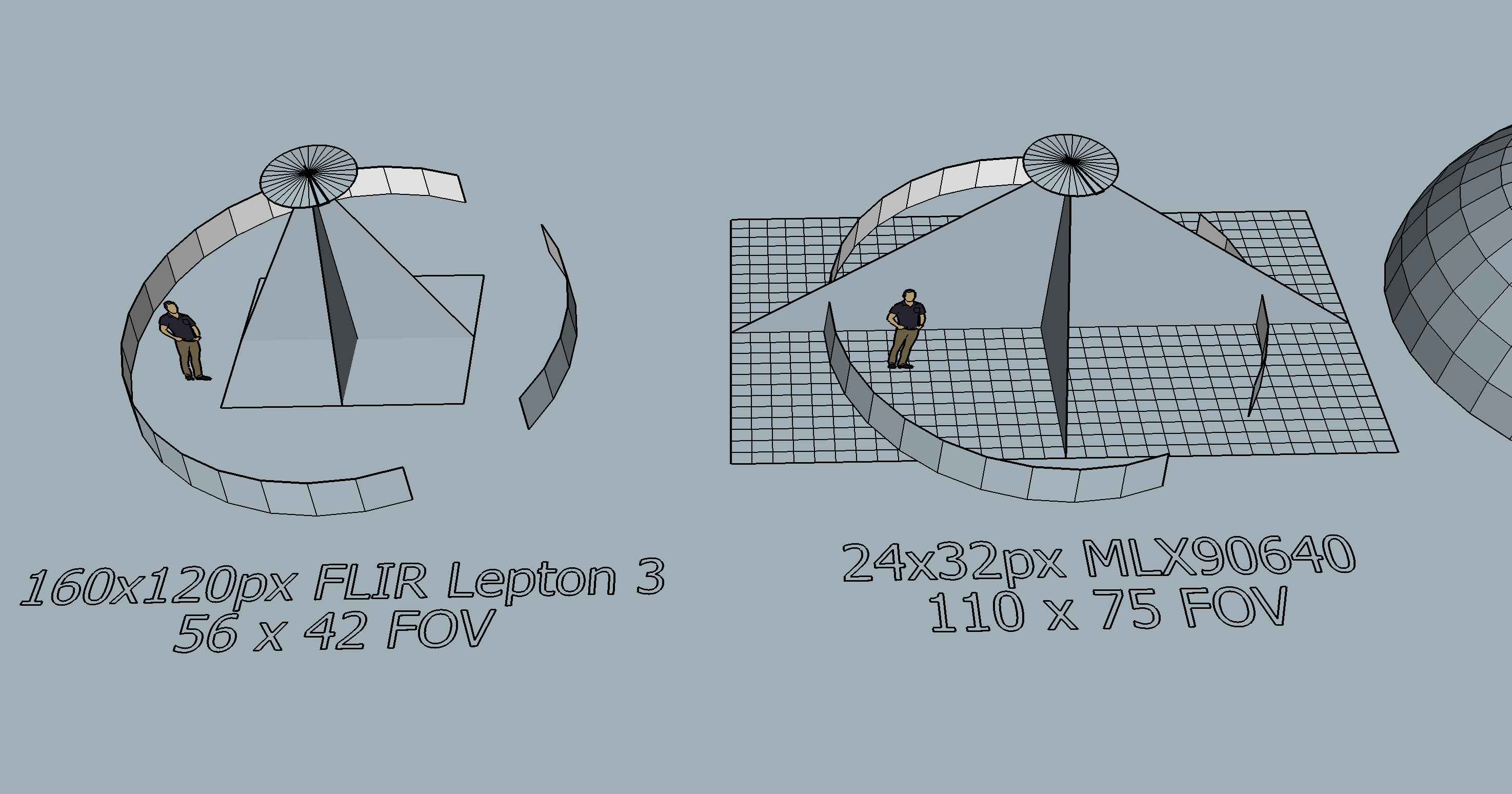
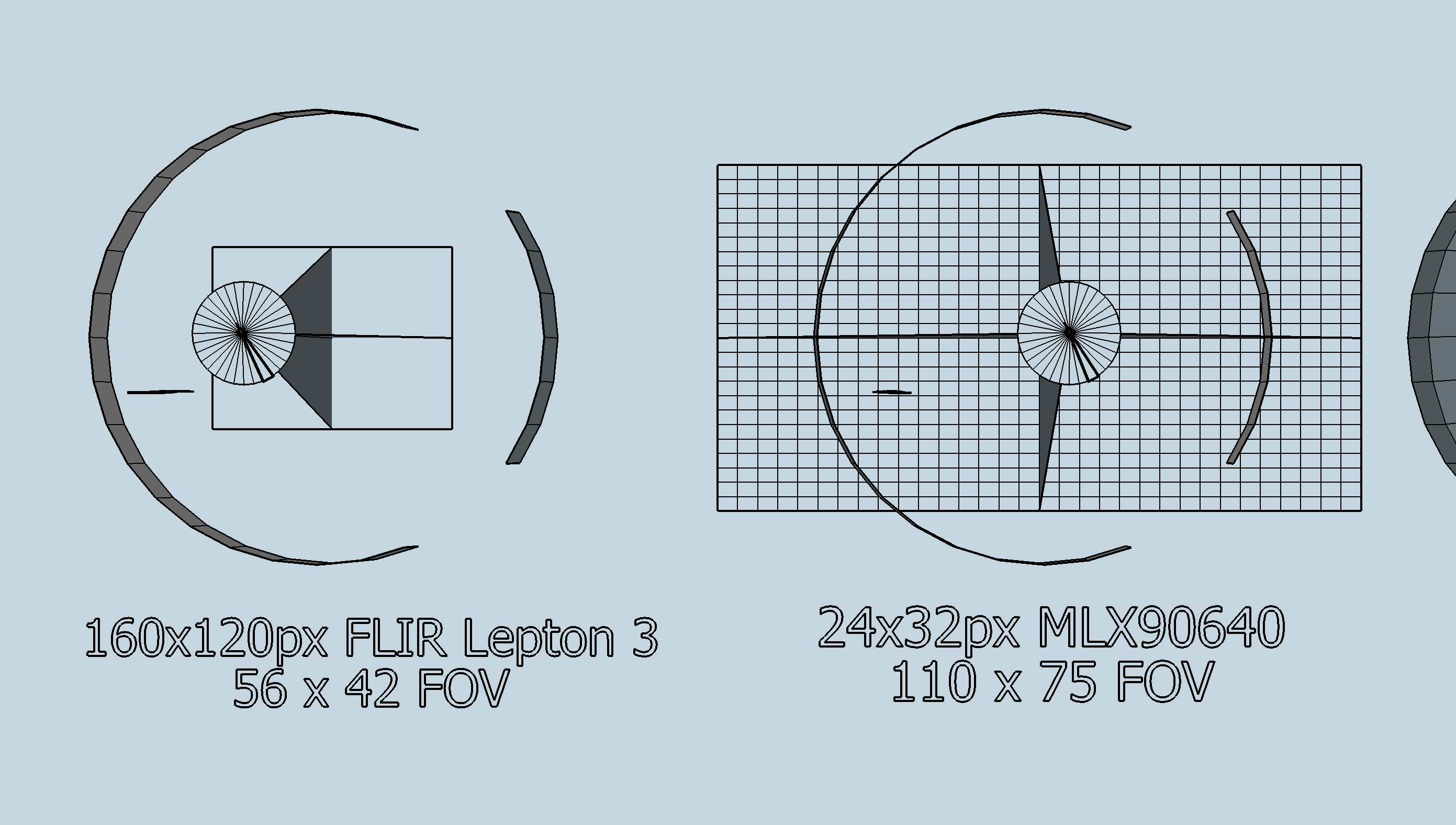
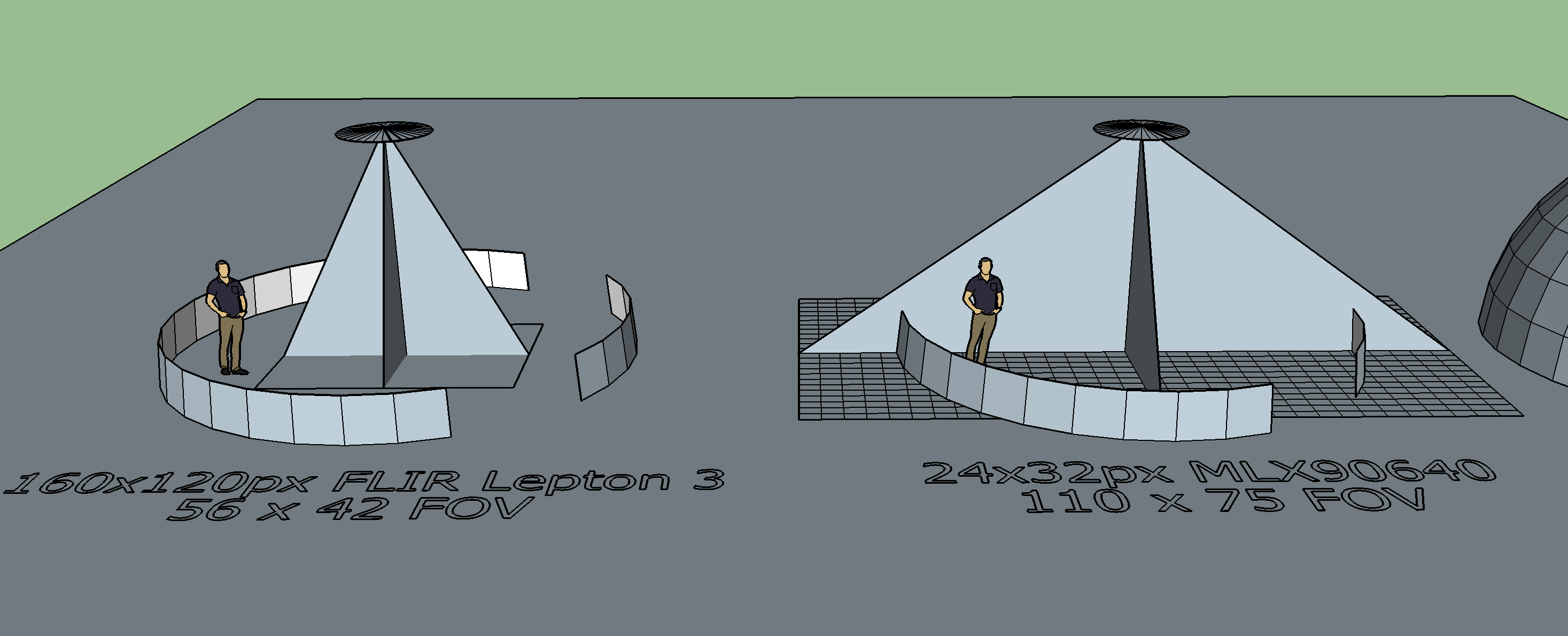
I have a MLX90640 thermal camera 13' above the ground. it has 32x24 resolution with a 110 x 75 Field of View.
I am trying to narrow the temperature range from -40 - 300 to a better range of 6 - 20. i think I am doing this right but am not sure.
I am trying to determine if contour detection or blob detection would be better for counting the number of people in the room. I am new to OpenCV and am not sure if I am using the image filters in the best way.
I posted the code below. Any advice or recommendations are appreciated.
Image of just one person.
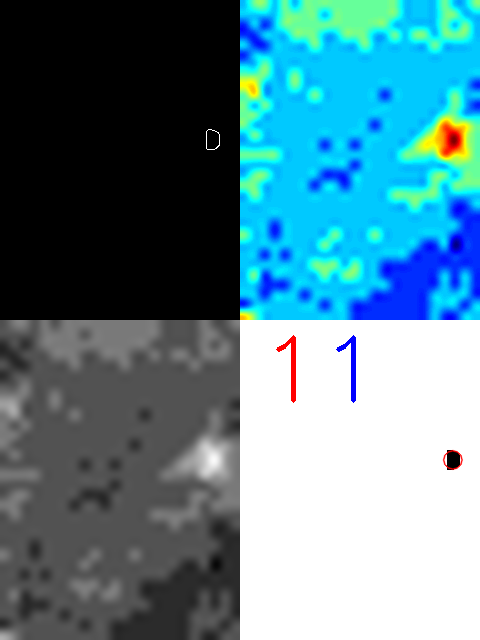
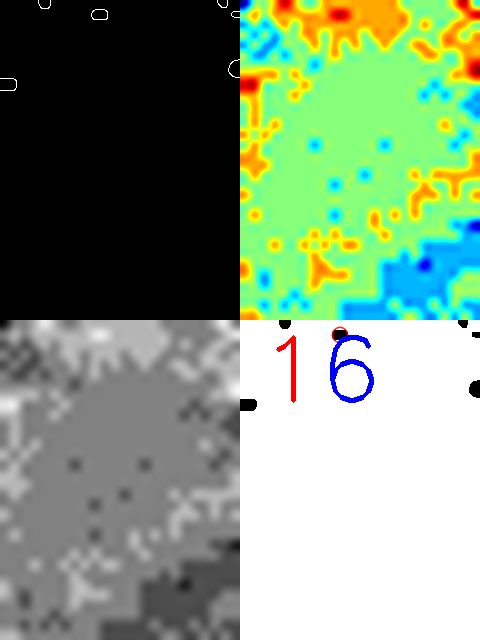
The sensor sometimes gives back strange data like extra hotspots such as in the image below. It is still with the same one person but the temps have fluctuated. The blob detector counts 1 while the contours count 6.
import sys
import os
import time
import colorsys
import numpy as np
import cv2
import datetime
from PIL import Image
sys.path.insert(0, "./build/lib.linux-armv7l-3.5")
import MLX90640 as mlx
img = Image.new( 'L', (24,32), "black")
def irCounter():
mlx.setup(8) #set frame rate of MLX90640
f = mlx.get_frame()
mlx.cleanup()
# get max and min temps from sensor
v_min = min(f)
v_max = max(f)
# Console output for testing
textTime = datetime.datetime.now().strftime('%Y-%m-%d %H:%M:%S') # get timestamp
print(textTime)
print(min(f))
print(max(f))
print("")
for x in range(24):
row = []
for y in range(32):
val = f[32 * (23-x) + y]
row.append(val)
img.putpixel((x, y), (int(val)))
# convert raw temp data to numpy array
imgIR = np.array(img)
## Threshold the -40C to 300 C temps to a more human range
# Sensor seems to read a bit cold, calibrate in final setting
rangeMin = 6 # low threshold temp in C
rangeMax = 20 # high threshold temp in C
# Apply thresholds based on min and max ranges
depth_scale_factor = 255.0 / (rangeMax-rangeMin)
depth_scale_beta_factor = -rangeMin*255.0/(rangeMax-rangeMin)
depth_uint8 = imgIR*depth_scale_factor+depth_scale_beta_factor
depth_uint8[depth_uint8>255] = 255
depth_uint8[depth_uint8<0] = 0
depth_uint8 = depth_uint8.astype('uint8')
# increase the 24x32 px image to 240x320px for ease of seeing
bigIR = cv2.resize(depth_uint8, dsize=(240,320), interpolation=cv2.INTER_CUBIC)
# Normalize the image
normIR = cv2.normalize(bigIR, bigIR, 0, 255, cv2.NORM_MINMAX, cv2.CV_8U)
# Apply a color heat map
colorIR = cv2.applyColorMap(normIR, cv2.COLORMAP_JET)
# Use a bilateral filter to blur while hopefully retaining edges
brightBlurIR = cv2.bilateralFilter(normIR,9,150,150)
# Threshold the image to black and white
retval, threshIR = cv2.threshold(brightBlurIR, 210, 255, cv2.THRESH_BINARY)
# Define kernal for erosion and dilation and closing operations
kernel = np.ones((5,5),np.uint8)
erosionIR = cv2.erode(threshIR,kernel,iterations = 1)
dilationIR = cv2.dilate(erosionIR,kernel,iterations = 1)
closingIR = cv2.morphologyEx(dilationIR, cv2.MORPH_CLOSE, kernel)
# Detect edges with Canny detection, currently only for visual testing not counting
edgesIR = cv2.Canny(closingIR,50,70, L2gradient=True)
# Detect countours
contours, hierarchy = cv2.findContours(closingIR, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
# Get the number of contours ( contours count when touching edge of image while blobs don't)
ncontours = str(len(contours))
# Invert the image
invertIR = cv2.bitwise_not(closingIR)
## Begin Blob Detection ##
# Setup SimpleBlobDetector parameters.
params = cv2.SimpleBlobDetector_Params()
# Change thresholds
params.minThreshold = 0;
params.maxThreshold = 255;
# Filter by Area.
params.filterByArea = True
params.minArea = 50
params.maxArea = 7000
# Filter by Circularity
params.filterByCircularity = True
params.minCircularity = 0.1
# Filter by Convexity
params.filterByConvexity = False
params.minConvexity = 0.01
# Filter by Inertia
params.filterByInertia = True
params.minInertiaRatio = 0.1
# Set up the detector with default parameters.
detector = cv2.SimpleBlobDetector_create(params)
# Detect blobs.
keypoints = detector.detect(invertIR)
## End Blob Detection ##
# Draw detected blobs as red circles.
# cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS ensures the size of the circle corresponds to the size of blob
IR_with_keypoints = cv2.drawKeypoints(invertIR, keypoints, np.array([]), (0,0,255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# Show keypoints
nblobs = str(len(keypoints))
# Test wether Blobs or Contours provide a more accurate count
# Put text number of Contour Keypoints on Screen in Blue
cv2.putText(IR_with_keypoints, nblobs, (20,80), cv2.FONT_HERSHEY_SIMPLEX, 3, (0,0,255),3)
# Put text number of Contour Keypoints on Screen in Blue
cv2.putText(IR_with_keypoints, ncontours, (80,80), cv2.FONT_HERSHEY_SIMPLEX, 3, (255,0,0),3)
#make all arrays same color space befor concatenating
RGBnormIR = cv2.cvtColor(normIR, cv2.COLOR_GRAY2RGB)
brightBlurIR = cv2.cvtColor(brightBlurIR, cv2.COLOR_GRAY2RGB)
edgesIR = cv2.cvtColor(edgesIR, cv2.COLOR_GRAY2RGB)
# stack 2 sets of images side by side for testing analysis
imstack1 = np.concatenate((edgesIR,colorIR), axis=1) #1 : horz, 0 : Vert.
imstack2 = np.concatenate((brightBlurIR,IR_with_keypoints), axis=1) #1 : horz, 0 : Vert.
# Then stack those 2 verticaly
imstack = np.concatenate((imstack1,imstack2), axis=0) #1 : horz, 0 : Vert.
# Show images in window during testing
cv2.imshow("Combined", imstack)
# Save timestamped PNGs of images and CSV of temperatures during tsting
imagepath = '/home/pi/irpython/images'
tempspath = '/home/pi/irpython/temps'
#np.savetxt(os.path.join(tempspath , textTime + " temps.csv"), f, delimiter=",") # save csv file of temps
#cv2.imwrite(os.path.join(imagepath , textTime + " frames.png"), imstack ) # save png of frames
cv2.waitKey(1)
try:
while True:
irCounter()
except KeyboardInterrupt:
print('interrupted!')