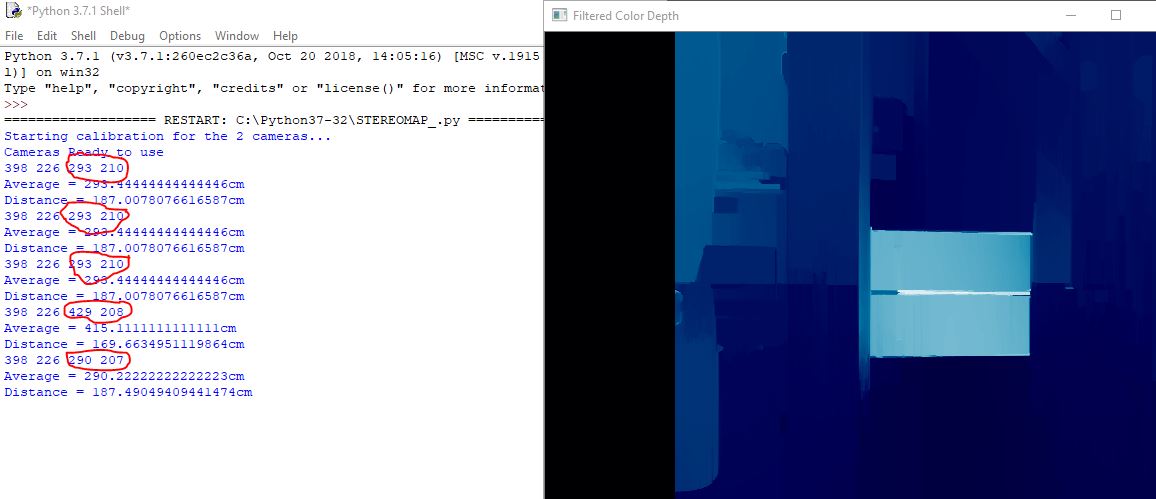
I successfully generated my depth map and printed out some x,y coordinates and its corresponding disparity. Through disparity, we could integrate distance measurement. The problem is, how can I have static disparity values? when I output them, its disparity value fluctuates? Is this normal or i would have some adjustments?
This forum is disabled, please visit https://forum.opencv.org