Hello ,
I have :
1- Rotation vector and translation vector of coordinate system (A) relative to camera (using Solvepnp()) .
2- constant Rotation "matrix" and translation vector between two coordinate systems ( A and B ).
3- 3d Point of the origin (B) relative to camera and the Pixel of (B).
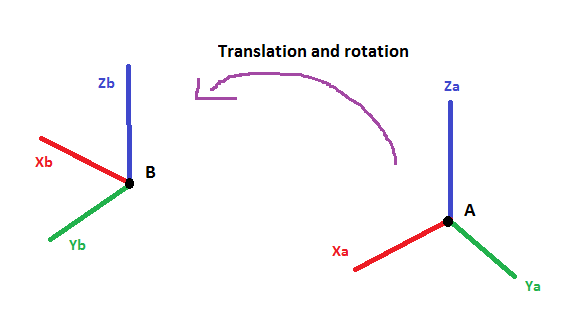
I want only to translate a coordinate system (point A) and rotate it about Axis Z to make a coordinate (B) . so after multiplying matrices i obtained rotation vector and translation vector of coordinate system (B) relative to camera.
but how can i draw this coordinate ?
I used (cv::projectPoints()) for Drawing this coordinate (B) but the result was strange (see please in 2. image).