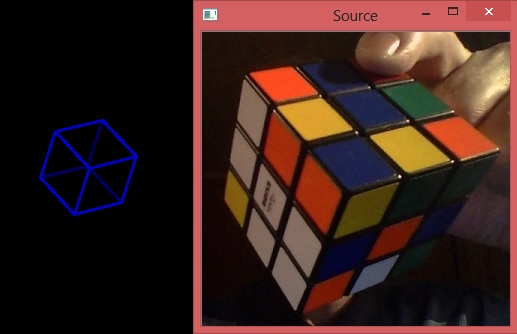
I feed 8 corners of the cube, but after reprojection sometimes (not for all images) the nearest point becomes the farthest and vice versa.
Can anybody explain the reason and how to cope with it?
| | 1 | initial version |
I feed 8 corners of the cube, but after reprojection sometimes (not for all images) the nearest point becomes the farthest and vice versa.
Can anybody explain the reason and how to cope with it?
I feed 8 corners of the cube, but after reprojection sometimes (not for all images) the nearest point becomes the farthest and vice versa.
Can anybody explain the reason and how to cope with it?
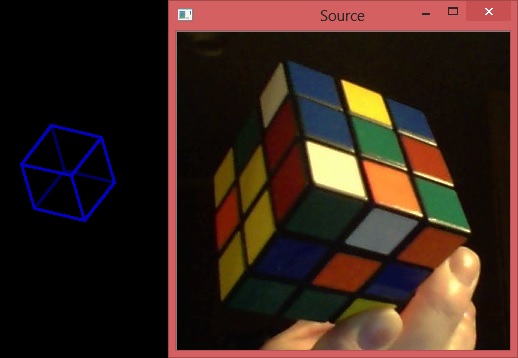
An example of correct case:
The code:
float box_side_x = 6; //Centimetres
float box_side_y = 6;
float box_side_z = 6;
vector<Point3f> boxPoints;
//Fill the array of corners in object coordinates. x to right(view from camera), y down, z from camera.
vector<Vec3d> boxCorners(8);
Vec3d boxCorner;
float x, y, z;
for (int h = 0; h < 2; ++h) {
for (int j = 0; j < 2; ++j) {
for (int i = 0; i < 2; ++i) {
x = box_side_x * i;
y = box_side_y * j;
z = box_side_z * h;
boxPoints.push_back(Point3f(x, y, z)); //For solvePnP()
boxCorners[i + 2 * j + 4 * h] = {x, y, z}; //For calculating output
}
}
}
solvePnP(boxPoints, pointBuf, cameraMatrix, distCoeffs, rvec, tvec, false);
Mat rmat;
Rodrigues(rvec, rmat);
Mat Result;
float S = 1;
for (int h = 0; h < 2; ++h) {
for (int j = 0; j < 2; ++j) {
for (int i = 0; i < 2; ++i) {
boxCorner = boxCorners[i+2*j+4*h]; //In centimetres
Result = S * (rmat * Mat(boxCorner) + tvec);
ObjPoints[i + 2 * j + 4 * h] = (Vec3f)Result; //In centimetres
}
}
}
In different file ObjPoints -> BoxCorners
vector<float> X(8), Y(8), Z(8);
for (int i = 0; i < 8; i++) {
BoxCorner = BoxCorners[i]; //In centimetres
X[i] = K * (BoxCorner[0] + Lx);
Y[i] = K * (BoxCorner[1] + Ly);
Z[i] = K * (BoxCorner[2] + Lz);
}
Scalar color = CV_RGB(0, 0, 200), back_color = CV_RGB(0, 0, 100);
int thickness = 2;
namedWindow("Projection", WINDOW_AUTOSIZE);
Point pt1 = Point(0, 0), pt2 = Point(0, 0);
pt1 = Point(X[7], Y[7]), pt2 = Point(X[6], Y[6]);
line(drawing, pt1, pt2, back_color, thickness);
pt1 = Point(X[7], Y[7]); pt2 = Point(X[5], Y[5]);
line(drawing, pt1, pt2, back_color, thickness);
pt1 = Point(X[7], Y[7]); pt2 = Point(X[3], Y[3]);
line(drawing, pt1, pt2, back_color, thickness);
pt1 = Point(X[0], Y[0]), pt2 = Point(X[1], Y[1]);
line(drawing, pt1, pt2, color, thickness);
pt1 = Point(X[0], Y[0]); pt2 = Point(X[2], Y[2]);
line(drawing, pt1, pt2, color, thickness);
pt1 = Point(X[0], Y[0]), pt2 = Point(X[4], Y[4]);
line(drawing, pt1, pt2, color, thickness);
pt1 = Point(X[1], Y[1]); pt2 = Point(X[3], Y[3]);
line(drawing, pt1, pt2, color, thickness);
pt1 = Point(X[3], Y[3]); pt2 = Point(X[2], Y[2]);
line(drawing, pt1, pt2, color, thickness);
pt1 = Point(X[2], Y[2]); pt2 = Point(X[6], Y[6]);
line(drawing, pt1, pt2, color, thickness);
pt1 = Point(X[6], Y[6]); pt2 = Point(X[4], Y[4]);
line(drawing, pt1, pt2, color, thickness);
pt1 = Point(X[4], Y[4]); pt2 = Point(X[5], Y[5]);
line(drawing, pt1, pt2, color, thickness);
pt1 = Point(X[5], Y[5]); pt2 = Point(X[1], Y[1]);
line(drawing, pt1, pt2, color, thickness);
imshow("Projection", drawing);