Hey guys,
I am currently trying to undistort a floating point mat (CV_32F) with the distortion map of the camera. It works well with the RGB image, but produces strange results with the floating point depth map. I always thought, the x/y position gets corrected, independent of the value at the position. But it seems like this is not the case, is it?
(Note: The color map might influence the appearance of the result, but i don't think that much.)
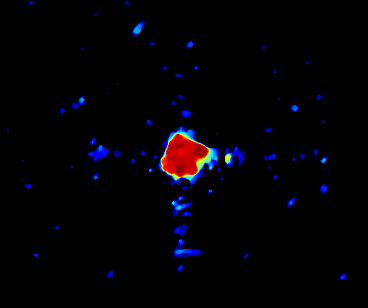
Before undistort:
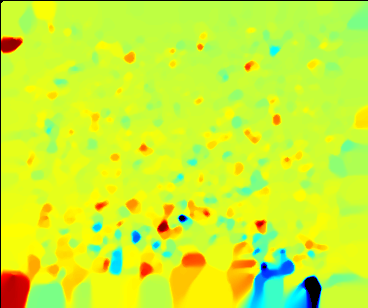
After undistort: