Quite new to openCV but I'm massively enthused by the power of the framework
I'm working with Python for the moment
I have a few questions here so bear with me...
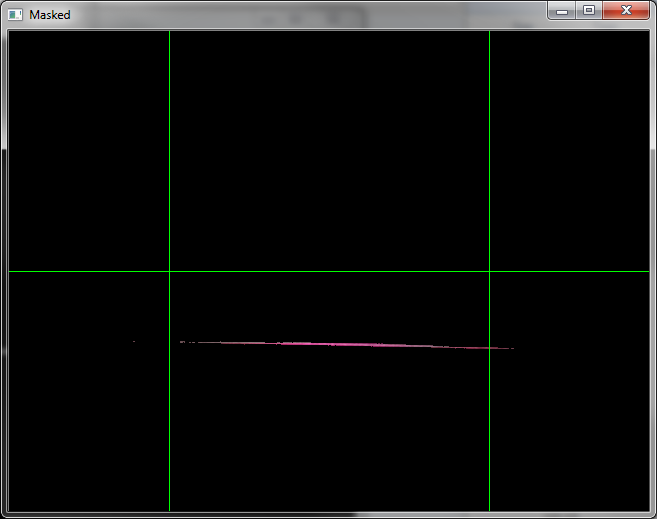
I'm working on a project where I have a laser line I can calibrate the line as exactly horizontal but I'd like to use the initial unbroken line to calibrate the machine at startup. This will give me a baseline and will become my plane
first question...
What's the most efficient way to calculate this plane given the below image
Now that we have this plane I need to perform some measurements
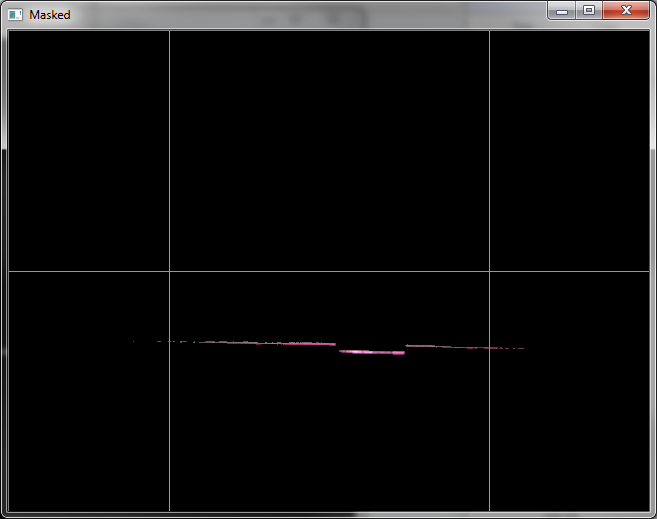
Where the line is broken here I need to work out how many pixels I am away from the baseline
Second Question... How can I work out the pixel distance here given that the plane is not horizontal? Ideally I want to build up an array of pixel distances for the entirety of the deviated line
I'm sure this is all easy stuff but it's got me stumped here tonight
Please help!