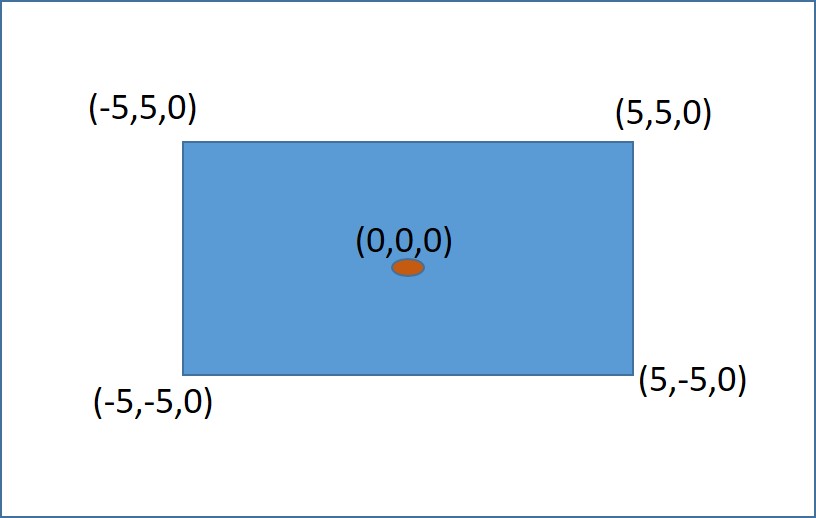
I estimate rvec and tvec using solvePNP . How can I convert the (0,0,0) point from world coordinate to the camera coordinate using rvec and tvec? Our model points is shown below:
This forum is disabled, please visit https://forum.opencv.org