Calibration with findCirclesGrid - trouble with pattern width/height
Hi,
I'm calibrating a GoPro Hero 4. I have calibrated using chessboard pattern. I would like to see if I can get a better calibration with the circles instead. However I'm having some problems determining the correct width/height.
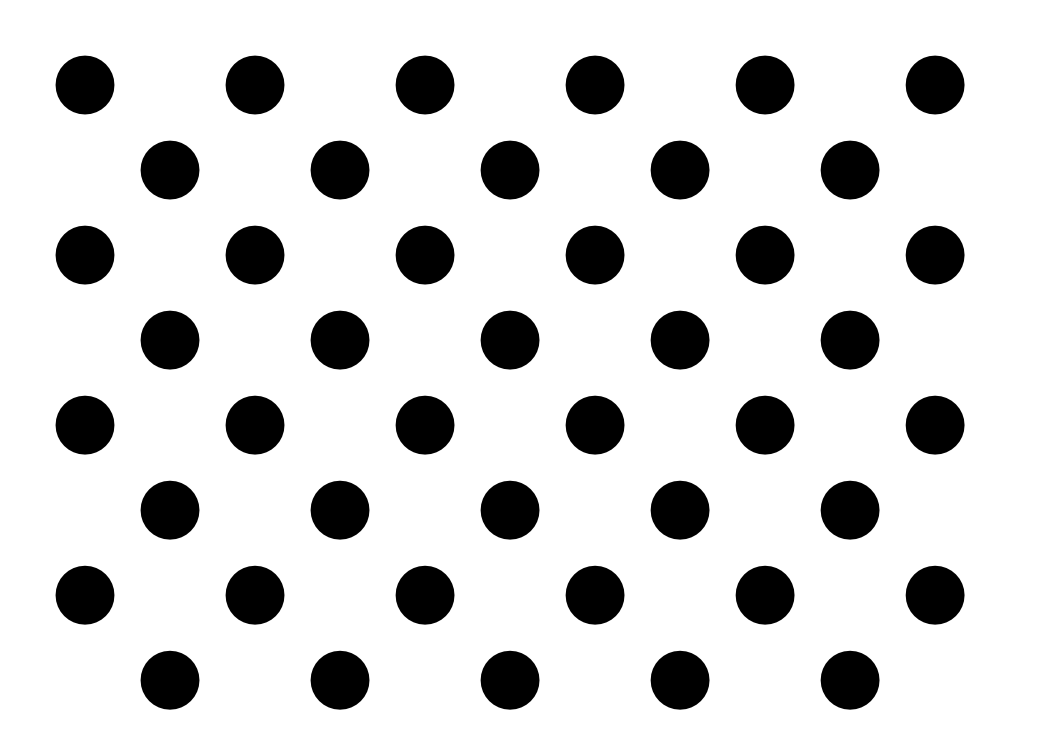
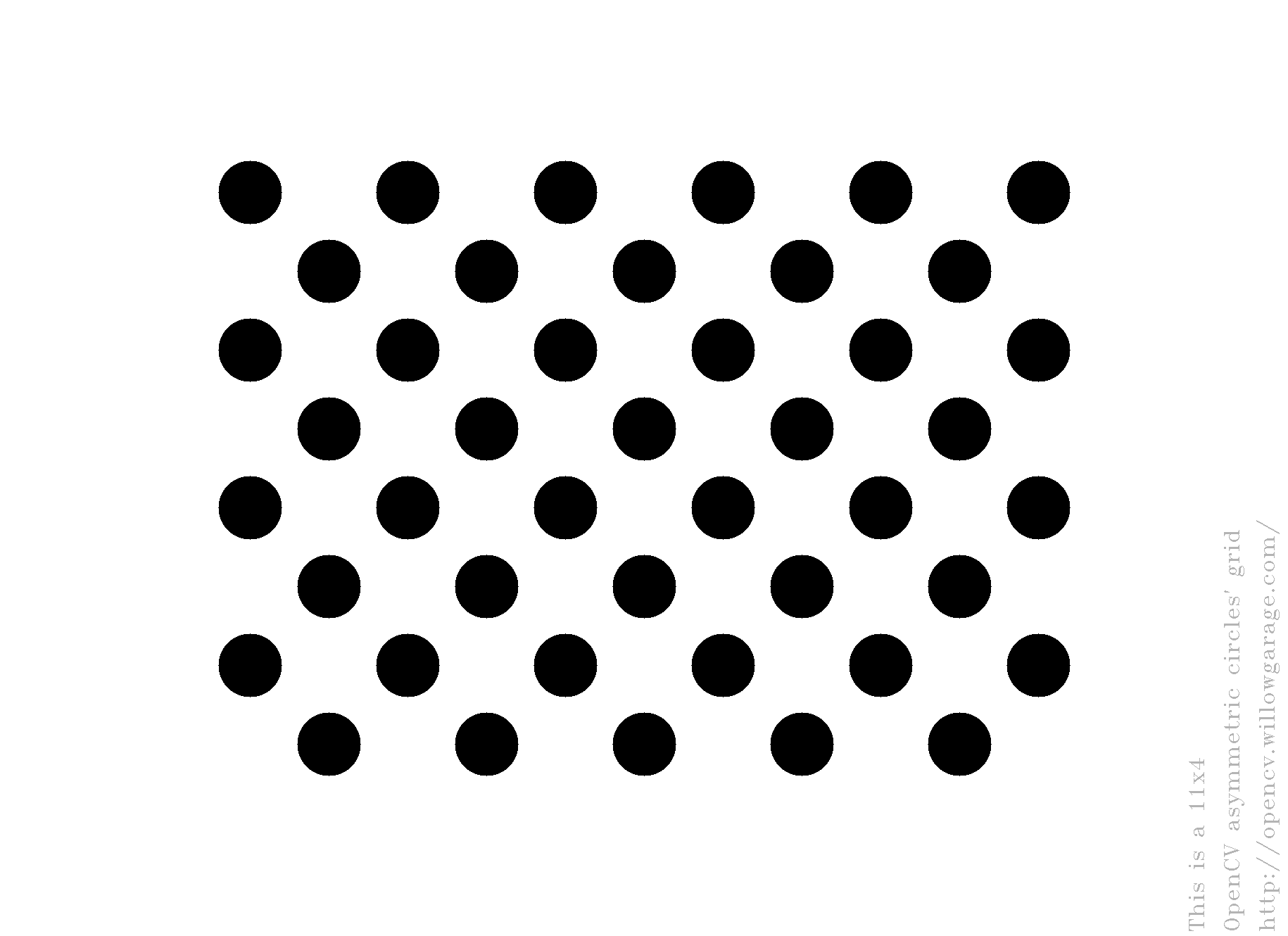
Here is the pattern I'm using (generated with the included gen_pattern.py):

I'm using command: findCirclesGrid(img, (width, height), cv2.CALIB_CB_ASYMMETRIC_GRID).
I have tried all possible combinations of any way you could count the width (14 or 7) and height (5 or 10), and any combination of the two. I also tried rotating the image. It detected the pattern in the following settings:
Wide image, width=7, height=10:
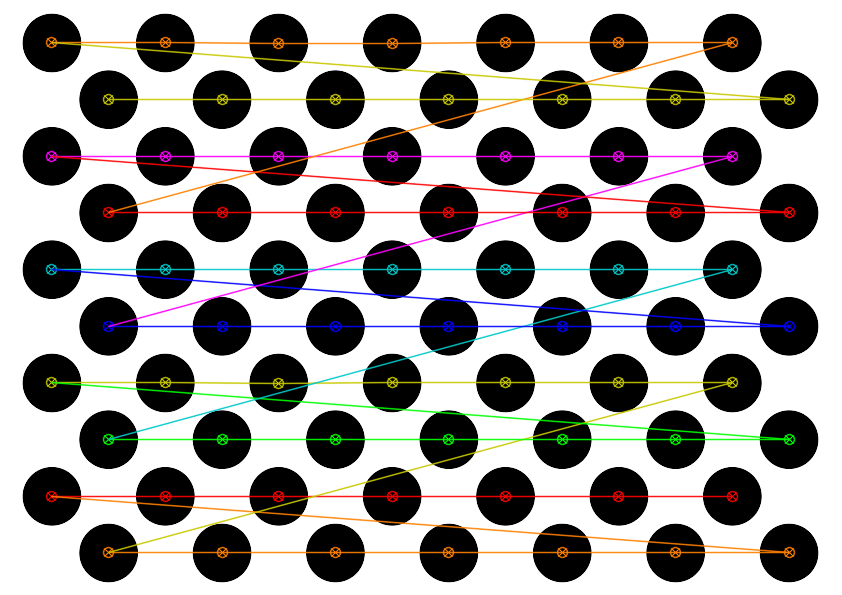
Looks correct at first glance, but seeing how the dots connect, it's wrong.
Wide image, width=5, height=14:

Clearly wrong.
Tall image, width=7, height=10:
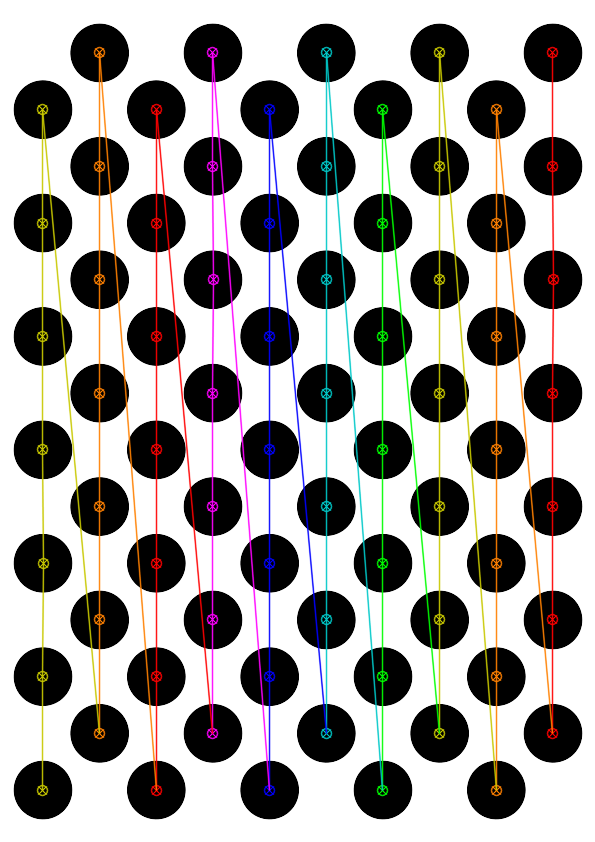
This is actually correct.
Tall image, width=5, height=14:

Again, clearly wrong.
So my questions are: 1. Why is there no correct way to detection the image in the wide orientation? 2. If I then choose the tall orientation of the image, does it only work if I had the actual image printout in the tall orientation, when posing it in front of the camera?
It seems somewhat less table to me than the chessboard, but I could be wrong?
What am I doing wrong? Thanks in advance.
{kind=link}
The second from the bottom looks correct. What's wrong?
Yes you're right, sorry. I knew that one of them was correct, I just forgot when I posed the question (fixed now). Actually my question is: 1. Why is there no correct way to detection the image in the wide orientation? 2. If I then choose the tall orientation of the image, does it only work if I had the actual image printout in the tall orientation, when posing it in front of the camera?
Well, I don't know. THIS is how it sorts the points, so take a look and see if there's a problem. I am busy this weekend, so I won't be able to help.
Alright, thanks.
Hi, did you get anywhere further with this? I'm currently running into the same issue depending on camera orientation (real life images).