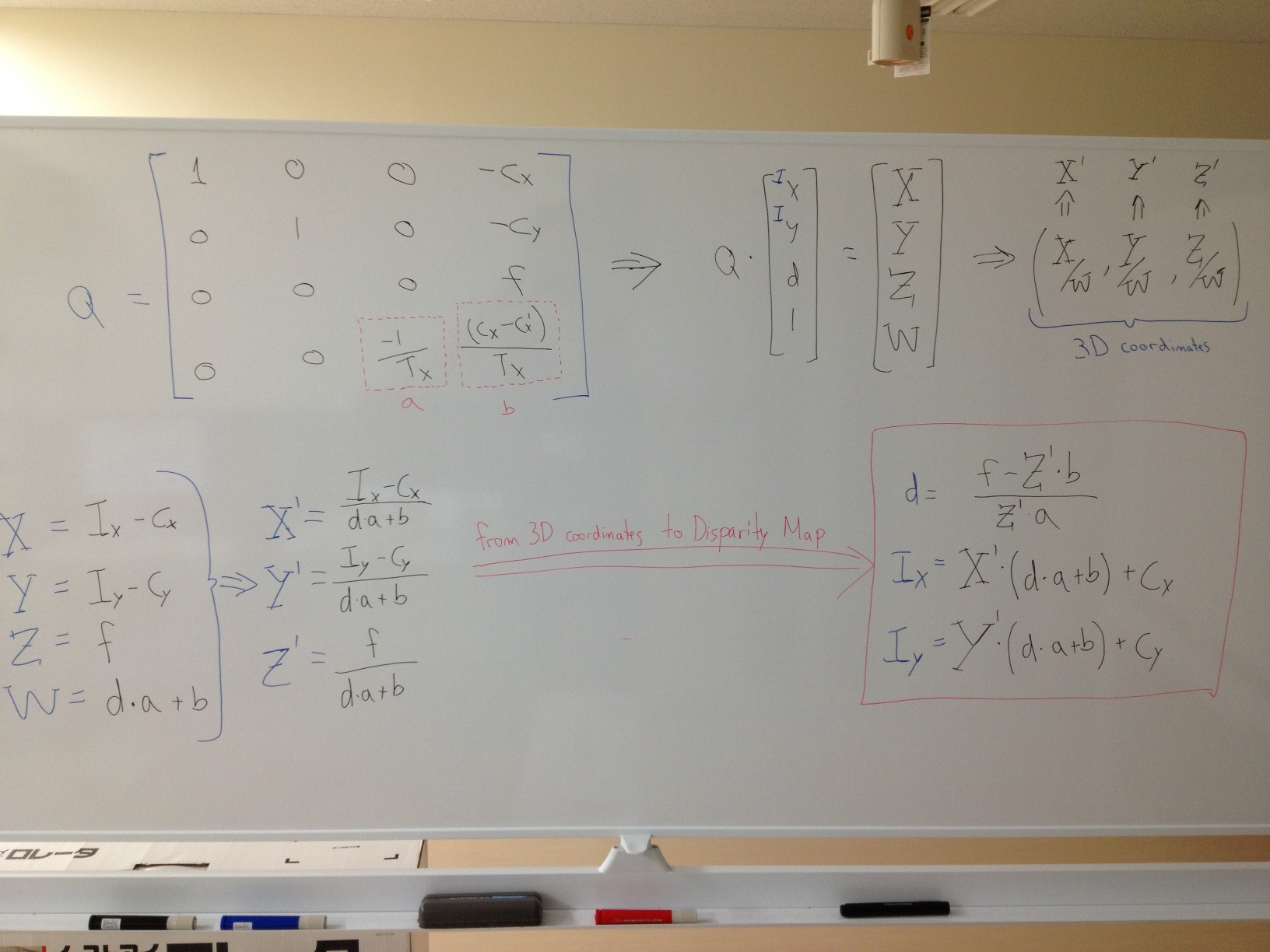
From 3d point cloud to disparity map
Using a stereo calibrated rig of cameras, Ive obtained a disparity map. Using the reprojectImageTo3D() function, I have the 3d point cloud. I want to do some filtering and segmentation on the point cloud and after that re-render it to a disparity image.
Is there an elegant way to do this? I know about projectPoints() and I found this rendering example http://opencv.jp/opencv2-x-samples/point-cloud-rendering but it offers a free way of viewing the point cloud. I would like to simulate it so the output I get is actually the same as the disparity map.
add a comment
{kind=link}