Drawing a rectangle around detected object with SIFT [closed]
Hello everyone, I'm trying to draw a rectangle around a detected object from an image to a scene (that's actually the first frame of a video), by using SIFT features and the homography matrix. First of all to get features and matching I'm using the following code:
cv::Ptr<Feature2D> f2d = xfeatures2d::SIFT::create();
Ptr<DescriptorExtractor> extractor = xfeatures2d::SIFT::create();
//part of the code not relevant...
Ptr<BFMatcher> matcher = BFMatcher::create(NORM_L2);
vector<DMatch> matches;
matcher->match(descriptors_object, descriptors_scene, matches);
//-- Localize the object
std::vector<Point2f> obj;
std::vector<Point2f> scene;
for (size_t i = 0; i < matches.size(); i++)
{
//-- Get the keypoints from the matches
obj.push_back(keypoints_object[matches[i].queryIdx].pt);
scene.push_back(keypoints_scene[matches[i].trainIdx].pt);
}
Mat mask;
Mat H = findHomography(obj, scene, RANSAC, 3.0, mask);
vector<DMatch> good_matches;
for (int r = 0; r < matches.size(); r++)
{
if ((int)mask.at<uchar>(r, 0) != 0)
{
good_matches.push_back(matches[r]);
}
}
//-- Draw matches
Mat img_matches;
drawMatches(img_object, keypoints_object, img_scene, keypoints_scene, good_matches, img_matches,
Scalar::all(-1), Scalar::all(-1), std::vector<char>());
I'm getting this result:
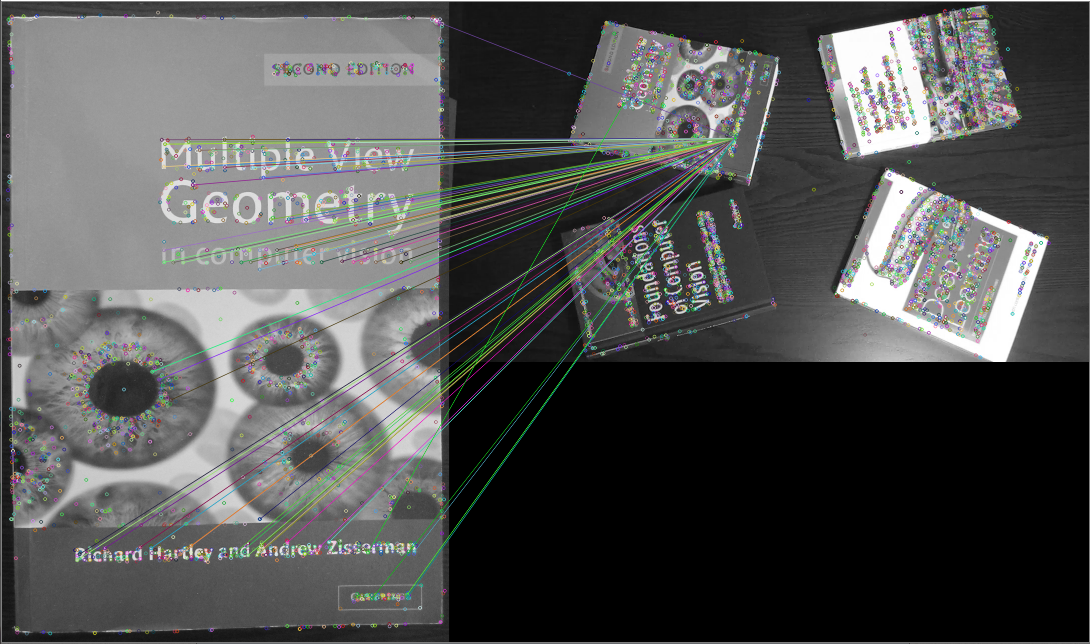
Now I'd like to draw a rectangle around THAT detected book. I wrote the following code:
//-- Get the corners from the image_1 ( the object to be "detected" )
std::vector<Point2f> obj_corners(4);
obj_corners[0] = Point2f(0, 0);
obj_corners[1] = Point2f((float)img_object.cols, 0);
obj_corners[2] = Point2f((float)img_object.cols, (float)img_object.rows);
obj_corners[3] = Point2f(0, (float)img_object.rows);
std::vector<Point2f> scene_corners(4);
perspectiveTransform(obj_corners, scene_corners, H);
//-- Draw lines between the corners (the mapped object in the scene - image_2 )
line(img_matches, scene_corners[0] + Point2f(img_object.cols, 0), scene_corners[1] + Point2f(img_object.cols, 0), Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[1] + Point2f(img_object.cols, 0), scene_corners[2] + Point2f(img_object.cols, 0), Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[2] + Point2f(img_object.cols, 0), scene_corners[3] + Point2f(img_object.cols, 0), Scalar(0, 255, 0), 4);
line(img_matches, scene_corners[3] + Point2f(img_object.cols, 0), scene_corners[0] + Point2f(img_object.cols, 0), Scalar(0, 255, 0), 4);
But I'm getting the same result as before, without the rectangle. Whatìs wrong with the code?
What is this? It doesn't matches on template. Did you see Multiple View. This lines and all lines go straight to Hartley.
So the problem is in in the first part of the code right? It actually doens't match correctly features... Do you suggest to change dataset?
I merely do in python. By looking @ your code. You don't needed a lines to draw an rectangle.
ORBautomatically draw a rectangle for you. I will post my link later.try to print out your projected points, most likely they're off-screen (because of a bad homography)
I changed the matcheds filtering and now it works: instead of using the homography mask to select only the inliners I choose good matches basing only on the Lowe's ratio test. I guess it's ok