Camera matrix to correct image distortion -python
Hello everyone
As i can see alot of other people have also had some problems with calibrating their camera.
Im in need to calibrate gopro hero 7 camera such that i can a more accurate image. Im using the tutorial script supplied by OpenCV to find the camera matrix and distortion coeff. however it might need to be improved abit (RMS 0.77).
But my main problem is when i want to apply my camera matrix and distortion coeff to correct new images.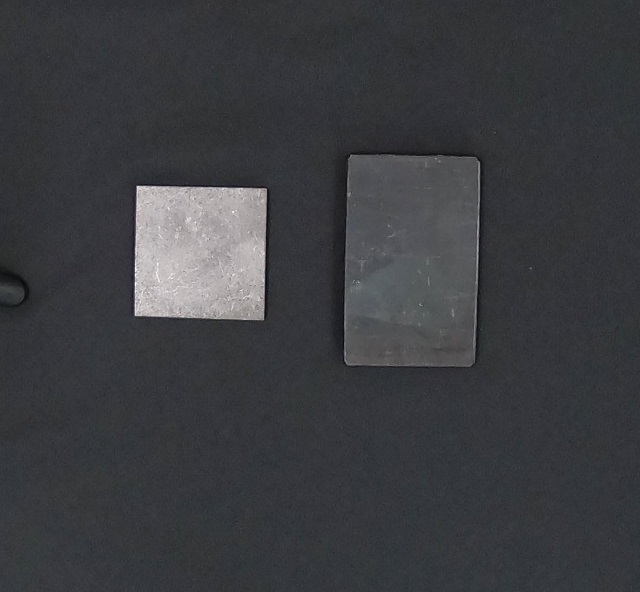
 Here can be seen 2 images - one before the "correction" and the second one after the correction. However it does not look quite right and im not sure what im doing wrong.
Im using cv2.getOptimalNewCameraMatrix and cv2.undistort.
My Roi are returning (0,0,0,0).
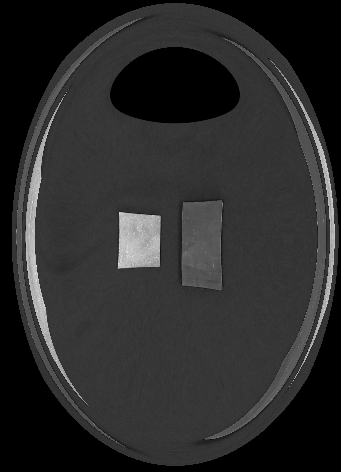
Here can be seen 2 images - one before the "correction" and the second one after the correction. However it does not look quite right and im not sure what im doing wrong.
Im using cv2.getOptimalNewCameraMatrix and cv2.undistort.
My Roi are returning (0,0,0,0).
I really hope that some one can help me out
looks like you have to go back to the calibration again. make sure, you got the corners of your images covered by the chessboard (most distortion is there) .