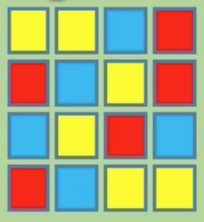
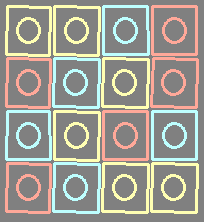
the question seems finding Rubics cube asked before,
i did some modifications on my code of previous answer like below and get this result image...
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
using namespace std;
// helper function:
// finds a cosine of angle between vectors
// from pt0->pt1 and from pt0->pt2
static double angle(Point pt1, Point pt2, Point pt0)
{
double dx1 = pt1.x - pt0.x;
double dy1 = pt1.y - pt0.y;
double dx2 = pt2.x - pt0.x;
double dy2 = pt2.y - pt0.y;
return (dx1*dx2 + dy1*dy2) / sqrt((dx1*dx1 + dy1*dy1)*(dx2*dx2 + dy2*dy2) + 1e-10);
}
static void drawSquares(Mat& image, const vector<vector<Point> >& squares)
{
Mat canvas(image.size(), CV_8SC3, Scalar(0, 0, 0));
for (size_t i = 0; i < squares.size(); i++)
{
const Point* p = &squares[i][0];
int n = (int)squares[i].size();
Rect r = boundingRect(squares[i]);
r.x = r.x + r.width / 4;
r.y = r.y + r.height / 4;
r.width = r.width / 2;
r.height = r.height / 2;
Mat roi = image(r);
Scalar color = mean(roi);
polylines(image, &p, &n, 1, true, color, 2);
polylines(canvas, &p, &n, 1, true, color, 2);
Point center(r.x + r.width / 2, r.y + r.height / 2);
ellipse(image, center, Size(r.width / 2, r.height / 2), 0, 0, 360, color, 2, LINE_AA);
ellipse(canvas, center, Size(r.width / 2, r.height / 2), 0, 0, 360, color, 2, LINE_AA);
}
imshow("canvas", canvas);
}
// returns sequence of squares detected on the image.
// the sequence is stored in the specified memory storage
static void findSquares(const Mat& image, vector<vector<Point> >& squares, bool inv = false)
{
squares.clear();
Mat gray, gray0;
vector<vector<Point> > contours;
cvtColor(image, gray0, COLOR_BGR2GRAY);
GaussianBlur(gray0, gray0, Size(5, 5), 1.5, 1.5);
Canny(gray0, gray, 0, 30, 3);
dilate(gray, gray, Mat());
imshow("canny", gray);
// find contours and store them all as a list
findContours(gray, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
vector<Point> approx;
// test each contour
for (size_t i = 0; i < contours.size(); i++)
{
// approximate contour with accuracy proportional
// to the contour perimeter
approxPolyDP(Mat(contours[i]), approx, 9, true);
// square contours should have 4 vertices after approximation
// relatively large area (to filter out noisy contours)
// and be convex.
// Note: absolute value of an area is used because
// area may be positive or negative - in accordance with the
// contour orientation
if (approx.size() == 4 &&
fabs(contourArea(Mat(approx))) > 5 &&
isContourConvex(Mat(approx)))
{
double maxCosine = 0;
for (int j = 2; j < 5; j++)
{
// find the maximum cosine of the angle between joint edges
double cosine = fabs(angle(approx[j % 4], approx[j - 2], approx[j - 1]));
maxCosine = MAX(maxCosine, cosine);
}
// if cosines of all angles are small
// (all angles are ~90 degree) then write quandrange
// vertices to resultant sequence
if (maxCosine < 0.3)
squares.push_back(approx);
}
}
}
int main(int argc, char** argv)
{
Mat frame;
vector<vector<Point> > squares;
frame =imread(argv[1]);
if (frame.empty())
{
return -1;
}
findSquares(frame, squares);
drawSquares(frame, squares);
imshow("result", frame);
waitKey(0);
return 0;
}