Interpret results from triangulatePoints
Hi,
I am detecting ArUco Markers with a stereo setup and would like to know the 3d coordinates of the corners. I am using triangulatePoints to achieve that (the rig is fully calibrated and I am calling undistortPoints before triangulating), but I do not understand how to interpret the results. Here is an example:
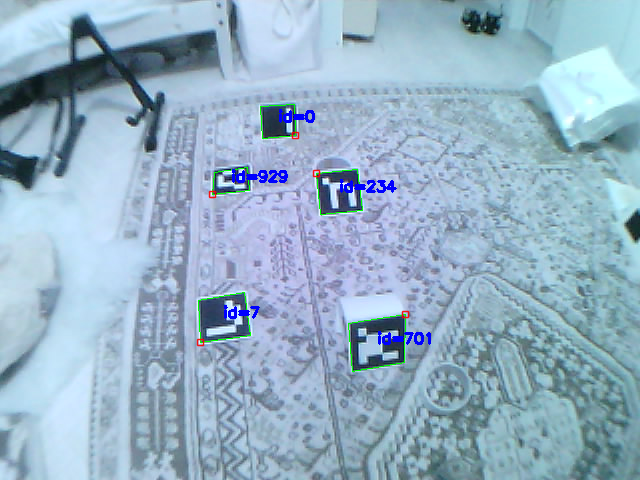

As you can see the markers are detected fine. The results of triangulatePoints are the following:
0.247877 0.0300715 0.501093
0.254448 0.0923606 0.518614
0.181621 0.0959466 0.508083
0.176167 0.0358917 0.50486
0.00881887 0.0501222 0.502481
0.00898725 0.00313973 0.520062
0.0636986 -0.00419561 0.526967
0.0654933 0.0450242 0.509843
0.166304 -0.163573 0.579394
0.225936 -0.172218 0.58141
0.230371 -0.112224 0.581557
0.170264 -0.104482 0.576754
0.0295858 -0.132247 0.574503
0.0318483 -0.16779 0.591691
0.0783909 -0.178207 0.602229
0.0787127 -0.13994 0.583072
0.151794 -0.236149 0.629165
0.102628 -0.229509 0.624732
0.0989285 -0.286064 0.634169
0.151599 -0.29231 0.637837
I tried to plot these in Matlab, and the result looks good:
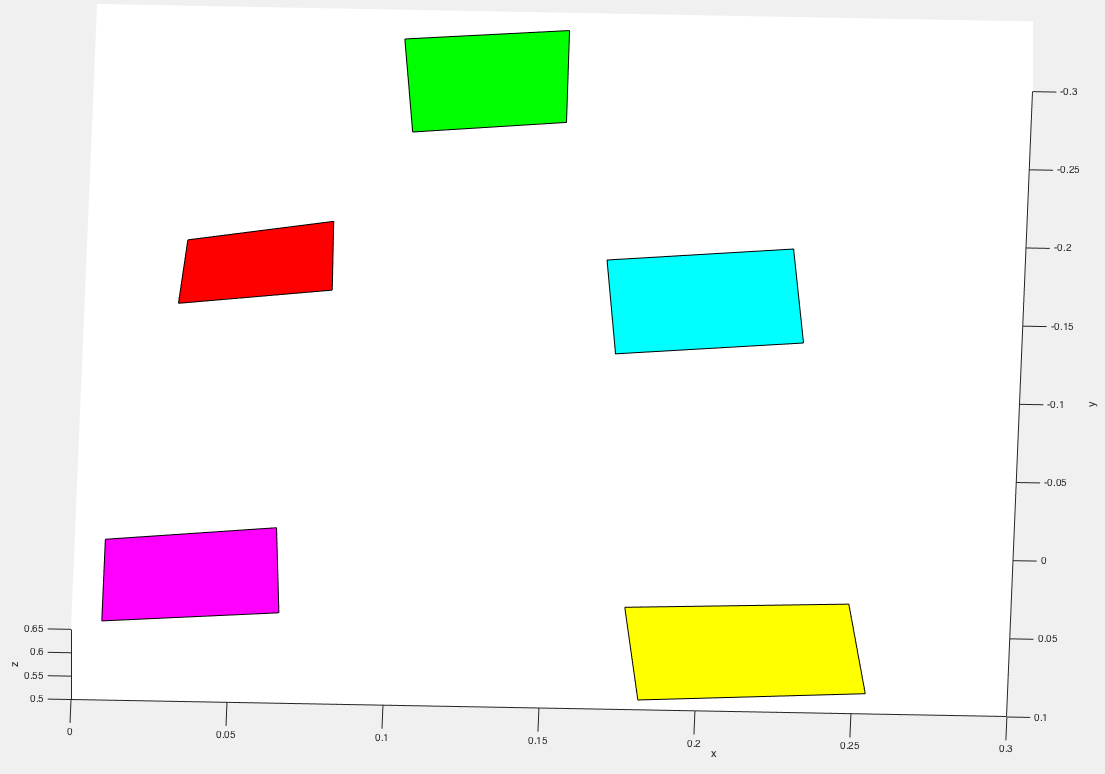
But I just cannot find any relations to the cameras position. I would like to have coordinates somehow relative to one of the cameras, so that the camera is the origin of the used coordinate system. How can I do that? I read that the origin is the optical center of the first camera, but then my x-values should not be all-positive, right?
I pursued this further and got some better calibration results by changing the flags, but I still cannot make use of the 3D points. These are some points I got now:
I updated the question with newer results and the plots, so please disregard the last two comments
Does anybody have an idea?