This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
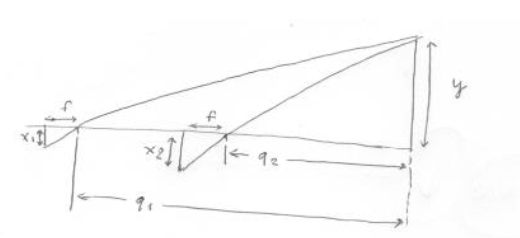
In this image : f stands for focal length , q1,q2 distances of an object from the camera , y a dimension of the object and x1,x2 the real size of the object in an image.
Let Dq=q1-q2 :
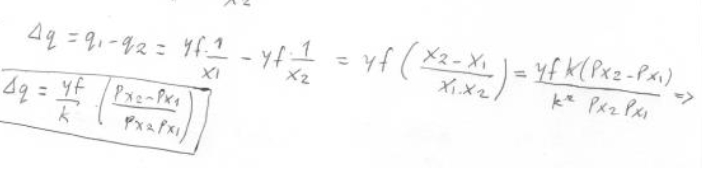 , where k is the size of the CCD of the camera , so Px1,Px2 are the pixel sizes in the image .
, where k is the size of the CCD of the camera , so Px1,Px2 are the pixel sizes in the image .
In that way , between two successive frames you can compute :
Dq and divide it by the time between two successive frames to find the velocity .
| | 2 | No.2 Revision |
In this image : f stands for focal length , q1,q2 distances of an object from the camera , y a dimension of the object and x1,x2 the real size of the object in an image.
Let Dq=q1-q2 :
, where k is the size of the CCD of the camera , so Px1,Px2 are the pixel sizes in the image .
In that way , between two successive frames you can compute :
Dq and divide it by the time between two successive frames to find the velocity .
Basic assumption is that the camera is centered in the middle of the car and that there are no turns etc. in the road .