This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
1-Execute four times dilate using a cross operator of size 3 2-Execute seven times erode using same cross
| | 2 | No.2 Revision |
1-Execute four times dilate using a cross operator of size 3
2-Execute seven times erode using same cross| | 3 | No.3 Revision |
0- binarize image 1-Execute four times dilate using a cross operator of size 3
2-Execute 2-With previous result Execute seven times erode using same cross
3- With previous result execute 9 times erode using same cross
| | 4 | No.4 Revision |
0- binarize image
1-Execute four times dilate using a cross operator of size 32-With previous result Execute seven times erode using same cross
3- With previous result execute 9 times erode using same cross
| | 5 | No.5 Revision |
0- binarize image
1-Execute four times dilate erode using a cross operator of size 3 5
2-With previous result Execute seven 8 times dilate using same cross
3- With previous result execute 4 times erode using same cross
3- With previous 4- inverse result execute 9 times erode using same cross
with this program :
int main (int argc,char **argv)
{
Mat statComposante; /*< http://docs.opencv.org/trunk/modules/imgproc/doc/structural_analysis_and_shape_descriptors.html */
Mat centreGComposante;
Mat mTest,mThresh,mConnected;
int nbIter;
int borderType=cv::BORDER_REPLICATE;
Scalar borderValue=cv::morphologyDefaultBorderValue();
Point ancrage=cv::Point(-1,-1);
cv::Mat element = cv::getStructuringElement( MORPH_CROSS,cv::Size( 5, 5 ),cv::Point( 2, 2 ) );
Mat m=imread("outputImage.jpg",CV_LOAD_IMAGE_GRAYSCALE);
Mat m1,m2,m3,m4,m5;
nbIter=4;
threshold(m,m1,50,255,THRESH_BINARY);
erode(m1, m2, element,ancrage,nbIter,borderType,borderValue);
nbIter=8;
dilate(m2, m3, element,ancrage,nbIter,borderType,borderValue);
nbIter=4;
erode(m3, m4, element,ancrage,nbIter,borderType,borderValue);
bitwise_not(m4,m5);
Mat mClone = m5.clone();
vector<vector<cv::Point> > contours;
findContours( mClone, contours,cv::RETR_EXTERNAL,cv::CHAIN_APPROX_NONE);
vector<Moments> mu(contours.size() );
for( int i = 0; i < contours.size(); i++ )
mu[i] = moments( contours[i], false );
for( int i = 0; i < contours.size(); i++ )
{
if (mu[i].m00>800)
cout <<"cut in : ("<< mu[i].m10/mu[i].m00 <<","<<mu[i].m01/mu[i].m00<< ")\n";
}
imwrite("test.jpg",m4);
return 0;
};
| | 6 | No.6 Revision |
0- binarize image
1-Execute four times erode using a cross operator of size 5
2-With previous result Execute 8 times dilate using same cross
3- With previous result execute 4 times erode using same cross
4- inverse result and look for contour and filter results..
One cut is missing but I think you can start with this program :
int main (int argc,char **argv)
{
Mat statComposante; /*< http://docs.opencv.org/trunk/modules/imgproc/doc/structural_analysis_and_shape_descriptors.html */
Mat centreGComposante;
Mat mTest,mThresh,mConnected;
int nbIter;
int borderType=cv::BORDER_REPLICATE;
Scalar borderValue=cv::morphologyDefaultBorderValue();
Point ancrage=cv::Point(-1,-1);
cv::Mat element = cv::getStructuringElement( MORPH_CROSS,cv::Size( 5, 5 ),cv::Point( 2, 2 ) );
Mat m=imread("outputImage.jpg",CV_LOAD_IMAGE_GRAYSCALE);
Mat m1,m2,m3,m4,m5;
nbIter=4;
threshold(m,m1,50,255,THRESH_BINARY);
erode(m1, m2, element,ancrage,nbIter,borderType,borderValue);
nbIter=8;
dilate(m2, m3, element,ancrage,nbIter,borderType,borderValue);
nbIter=4;
erode(m3, m4, element,ancrage,nbIter,borderType,borderValue);
bitwise_not(m4,m5);
Mat mClone = m5.clone();
vector<vector<cv::Point> > contours;
findContours( mClone, contours,cv::RETR_EXTERNAL,cv::CHAIN_APPROX_NONE);
vector<Moments> mu(contours.size() );
for( int i = 0; i < contours.size(); i++ )
mu[i] = moments( contours[i], false );
for( int i = 0; i < contours.size(); i++ )
{
if (mu[i].m00>800)
cout <<"cut in : ("<< mu[i].m10/mu[i].m00 <<","<<mu[i].m01/mu[i].m00<< ")\n";
}
imwrite("test.jpg",m4);
return 0;
};
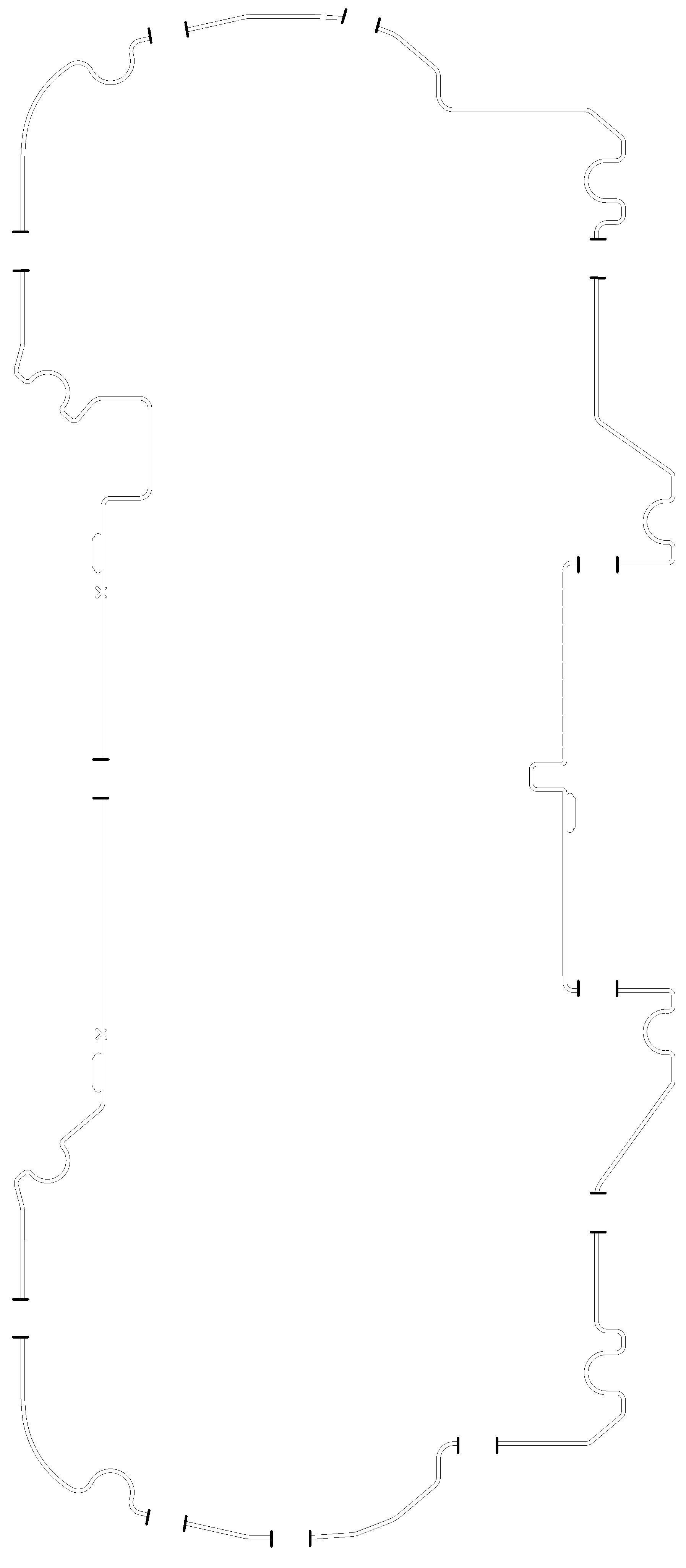
| | 7 | No.7 Revision |
0- binarize image
1-Execute four times erode using a cross operator of size 5
2-With previous result Execute 8 times dilate using same cross
3- With previous result execute 4 times erode using same cross
4- inverse result and look for contour and filter results..
One cut is missing but I think you can start with this program :
int main (int argc,char **argv)
{
Mat statComposante; /*< http://docs.opencv.org/trunk/modules/imgproc/doc/structural_analysis_and_shape_descriptors.html */
Mat centreGComposante;
Mat mTest,mThresh,mConnected;
int nbIter;
int borderType=cv::BORDER_REPLICATE;
Scalar borderValue=cv::morphologyDefaultBorderValue();
Point ancrage=cv::Point(-1,-1);
cv::Mat element = cv::getStructuringElement( MORPH_CROSS,cv::Size( 5, 5 7, 7 ),cv::Point( 2, 2 3, 3 ) );
Mat m=imread("outputImage.jpg",CV_LOAD_IMAGE_GRAYSCALE);
Mat m1,m2,m3,m4,m5;
nbIter=4;
threshold(m,m1,50,255,THRESH_BINARY);
erode(m1, m2, element,ancrage,nbIter,borderType,borderValue);
nbIter=8;
nbIter=7;
dilate(m2, m3, element,ancrage,nbIter,borderType,borderValue);
nbIter=4;
erode(m3, m4, element,ancrage,nbIter,borderType,borderValue);
bitwise_not(m4,m5);
Mat mClone = m5.clone();
vector<vector<cv::Point> > contours;
findContours( mClone, contours,cv::RETR_EXTERNAL,cv::CHAIN_APPROX_NONE);
vector<Moments> mu(contours.size() );
for( int i = 0; i < contours.size(); i++ )
mu[i] = moments( contours[i], false );
for( int i = 0; i < contours.size(); i++ )
{
if (mu[i].m00>800)
(mu[i].m00>1000)
cout <<"cut in : ("<< mu[i].m10/mu[i].m00 <<","<<mu[i].m01/mu[i].m00<< ")\n";
}
imwrite("test.jpg",m4);
return 0;
};
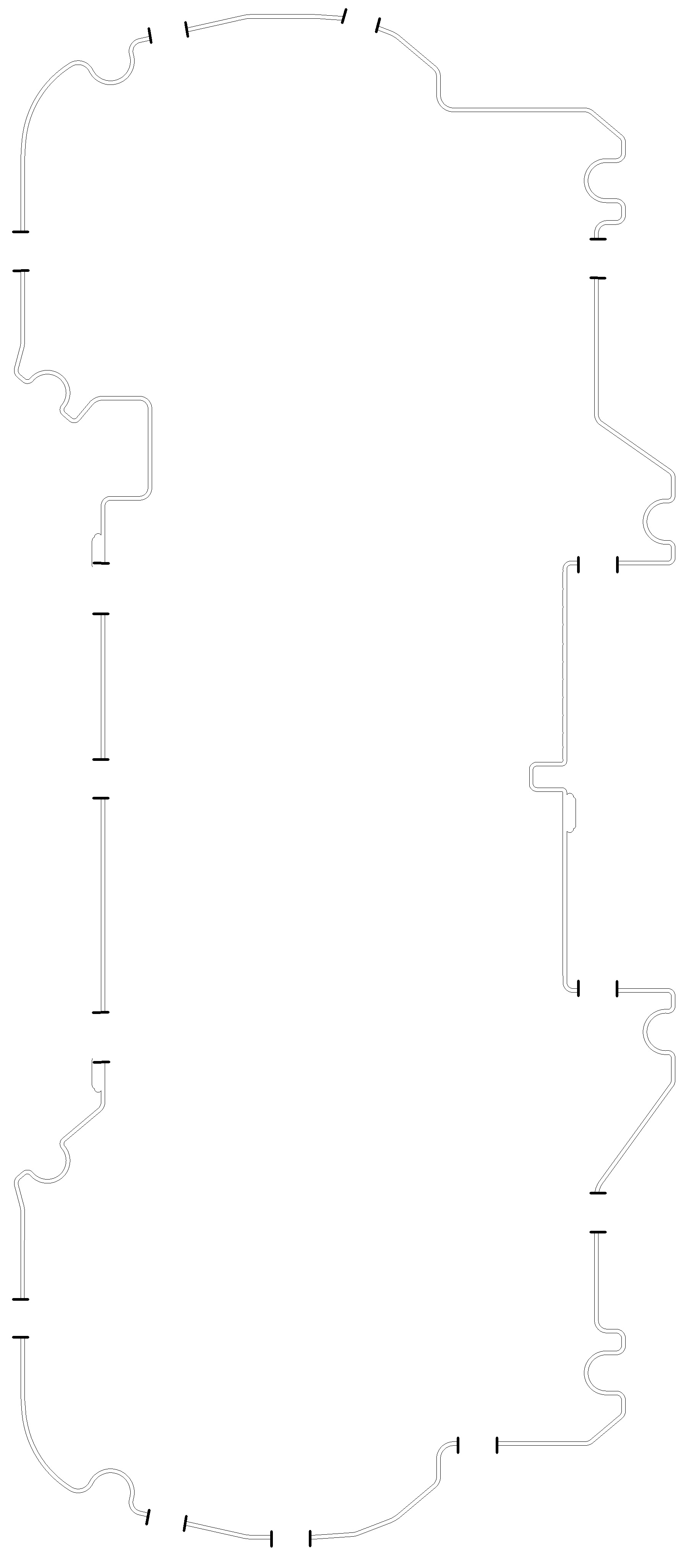
| | 8 | No.8 Revision |
0- binarize image
1-Execute four times erode using a cross operator of size 5
2-With previous result Execute 8 times dilate using same cross
3- With previous result execute 4 times erode using same cross
4- inverse result and look for contour and filter results..
One cut is missing but I think you can start with this program :
int main (int argc,char **argv)
{
Mat statComposante; /*< http://docs.opencv.org/trunk/modules/imgproc/doc/structural_analysis_and_shape_descriptors.html */
Mat centreGComposante;
Mat mTest,mThresh,mConnected;
int nbIter;
int borderType=cv::BORDER_REPLICATE;
Scalar borderValue=cv::morphologyDefaultBorderValue();
Point ancrage=cv::Point(-1,-1);
cv::Mat element = cv::getStructuringElement( MORPH_CROSS,cv::Size( 7, 7 ),cv::Point( 3, 3 ) );
Mat m=imread("outputImage.jpg",CV_LOAD_IMAGE_GRAYSCALE);
m=imread("C:/Users/Laurent.PC-LAURENT-VISI/Downloads/simplifiedInput.jpg",CV_LOAD_IMAGE_GRAYSCALE);
Mat m1,m2,m3,m4,m5;
nbIter=4;
threshold(m,m1,50,255,THRESH_BINARY);
imwrite("m1.png",m1);
erode(m1, m2, element,ancrage,nbIter,borderType,borderValue);
imwrite("m2.png",m2);
nbIter=7;
dilate(m2, m3, element,ancrage,nbIter,borderType,borderValue);
nbIter=4;
imwrite("m3.png",m3);
nbIter=5;
erode(m3, m4, element,ancrage,nbIter,borderType,borderValue);
imwrite("m4.png",m4);
bitwise_not(m4,m5);
Mat mClone = m5.clone();
vector<vector<cv::Point> > contours;
findContours( mClone, contours,cv::RETR_EXTERNAL,cv::CHAIN_APPROX_NONE);
vector<Moments> mu(contours.size() mo(contours.size() );
vector<Mat> hu(contours.size() );
for( int i = 0; i < contours.size(); i++ )
mu[i] {
mo[i] = moments( contours[i], false );
HuMoments((const Moments)mo[i], hu[i]);
}
for( int i = 0; i < contours.size(); i++ )
{
for (int j=0;j<7;j++)
cout << hu[i].at<double>(j, 0)<<"\t";
cout << "\n";
}
for( int i = 0; i < contours.size(); i++ )
{
if (mu[i].m00>1000)
cout <<"cut (mo[i].m00>1000 && mo[i].m00<5000)
cout<<i <<" cut in : ("<< mu[i].m10/mu[i].m00 <<","<<mu[i].m01/mu[i].m00<< ")\n";
mo[i].m10/mo[i].m00 <<","<<mo[i].m01/mo[i].m00<< ")"<<1/2.0*atan(2*mo[i].mu11/(mo[i].mu20-mo[i].mu02))<<"\n";
}
int nb=0;
double pi = acos(-1.0);
for( int i = 0; i < contours.size(); i++ )
{
if (fabs(hu[i].at<double>(0, 0) - 0.2) < 0.02)
{
cout<<nb<<" "<<i <<" cut in : ("<< mo[i].m10/mo[i].m00 <<","<<mo[i].m01/mo[i].m00<< ")" <<hu[i]<<"\n";
double theta=1/2.0*atan(2*mo[i].mu11/(mo[i].mu20-mo[i].mu02));
double xg=mo[i].m10/mo[i].m00,yg=mo[i].m01/mo[i].m00;
double xf,yf;
double minorAxis2= sqrt((mo[i].mu20+mo[i].mu02-sqrt(pow(mo[i].mu20-mo[i].mu02,2.0)+4*mo[i].mu11*mo[i].mu11))/2);
if (mo[i].mu20>mo[i].mu02)
theta += pi/2;
if (theta<0)
theta += pi;
double majorAxis2= sqrt((mo[i].mu20+mo[i].mu02+sqrt(pow(mo[i].mu20-mo[i].mu02,2.0)+4*mo[i].mu11*mo[i].mu11))/2);
xf = xg + sqrt(minorAxis2)*cos(theta+pi/2);
yf = yg + sqrt(minorAxis2)*sin(theta+pi/2);
line(m, Point(xg, yg), Point(xf, yf), Scalar(0),5);
xf = xg - sqrt(minorAxis2)*cos(theta+pi/2);
yf = yg - sqrt(minorAxis2)*sin(theta+pi/2);
line(m, Point(xg, yg), Point(xf, yf), Scalar(0),5);
xf = xg + sqrt(majorAxis2)*cos(theta);
yf = yg + sqrt(majorAxis2)*sin(theta);
line(m, Point(xg, yg), Point(xf, yf), Scalar(128),5);
xf = xg - sqrt(majorAxis2)*cos(theta);
yf = yg - sqrt(majorAxis2)*sin(theta);
line(m, Point(xg, yg), Point(xf, yf), Scalar(128),5);
nb++;
}
}
imwrite("Fin.jpg",m);
imwrite("test.jpg",m4);
return 0;
};
with this result
| | 9 | No.9 Revision |
0- binarize image
1-Execute four times erode using a cross operator of size 5
2-With previous result Execute 8 times dilate using same cross
3- With previous result execute 4 times erode using same cross
4- inverse result and look for contour and filter results..
One cut is missing but I think you can start with this program :
int main (int argc,char **argv)
{
Mat mTest,mThresh,mConnected;
int nbIter;
int borderType=cv::BORDER_REPLICATE;
Scalar borderValue=cv::morphologyDefaultBorderValue();
Point ancrage=cv::Point(-1,-1);
cv::Mat element = cv::getStructuringElement( MORPH_CROSS,cv::Size( 7, 7 ),cv::Point( 3, 3 ) );
Mat m=imread("C:/Users/Laurent.PC-LAURENT-VISI/Downloads/simplifiedInput.jpg",CV_LOAD_IMAGE_GRAYSCALE);
Mat m1,m2,m3,m4,m5;
nbIter=4;
threshold(m,m1,50,255,THRESH_BINARY);
imwrite("m1.png",m1);
erode(m1, m2, element,ancrage,nbIter,borderType,borderValue);
imwrite("m2.png",m2);
nbIter=7;
dilate(m2, m3, element,ancrage,nbIter,borderType,borderValue);
imwrite("m3.png",m3);
nbIter=5;
erode(m3, m4, element,ancrage,nbIter,borderType,borderValue);
imwrite("m4.png",m4);
bitwise_not(m4,m5);
Mat mClone = m5.clone();
vector<vector<cv::Point> > contours;
findContours( mClone, contours,cv::RETR_EXTERNAL,cv::CHAIN_APPROX_NONE);
vector<Moments> mo(contours.size() );
vector<Mat> hu(contours.size() );
for( int i = 0; i < contours.size(); i++ )
{
mo[i] = moments( contours[i], false );
HuMoments((const Moments)mo[i], hu[i]);
}
for( int i = 0; i < contours.size(); i++ )
{
for (int j=0;j<7;j++)
cout << hu[i].at<double>(j, 0)<<"\t";
cout << "\n";
}
for( int i = 0; i < contours.size(); i++ )
{
if (mo[i].m00>1000 && mo[i].m00<5000)
cout<<i <<" cut in : ("<< mo[i].m10/mo[i].m00 <<","<<mo[i].m01/mo[i].m00<< ")"<<1/2.0*atan(2*mo[i].mu11/(mo[i].mu20-mo[i].mu02))<<"\n";
}
int nb=0;
double pi = acos(-1.0);
for( int i = 0; i < contours.size(); i++ )
{
if (fabs(hu[i].at<double>(0, 0) - 0.2) < 0.02)
{
cout<<nb<<" "<<i <<" cut in : ("<< mo[i].m10/mo[i].m00 <<","<<mo[i].m01/mo[i].m00<< ")" <<hu[i]<<"\n";
double theta=1/2.0*atan(2*mo[i].mu11/(mo[i].mu20-mo[i].mu02));
double xg=mo[i].m10/mo[i].m00,yg=mo[i].m01/mo[i].m00;
double xf,yf;
double minorAxis2= sqrt((mo[i].mu20+mo[i].mu02-sqrt(pow(mo[i].mu20-mo[i].mu02,2.0)+4*mo[i].mu11*mo[i].mu11))/2);
if (mo[i].mu20>mo[i].mu02)
theta += pi/2;
if (theta<0)
theta += pi;
double majorAxis2= sqrt((mo[i].mu20+mo[i].mu02+sqrt(pow(mo[i].mu20-mo[i].mu02,2.0)+4*mo[i].mu11*mo[i].mu11))/2);
xf = xg + sqrt(minorAxis2)*cos(theta+pi/2);
sqrt(minorAxis2)*cos(theta);
yf = yg + sqrt(minorAxis2)*sin(theta+pi/2);
sqrt(minorAxis2)*sin(theta);
line(m, Point(xg, yg), Point(xf, yf), Scalar(0),5);
xf = xg - sqrt(minorAxis2)*cos(theta+pi/2);
sqrt(minorAxis2)*cos(theta);
yf = yg - sqrt(minorAxis2)*sin(theta+pi/2);
sqrt(minorAxis2)*sin(theta);
line(m, Point(xg, yg), Point(xf, yf), Scalar(0),5);
xf = xg + sqrt(majorAxis2)*cos(theta);
sqrt(majorAxis2)*cos(theta+pi/2);
yf = yg + sqrt(majorAxis2)*sin(theta);
sqrt(majorAxis2)*sin(theta+pi/2);
line(m, Point(xg, yg), Point(xf, yf), Scalar(128),5);
xf = xg - sqrt(majorAxis2)*cos(theta);
sqrt(majorAxis2)*cos(theta+pi/2);
yf = yg - sqrt(majorAxis2)*sin(theta);
sqrt(majorAxis2)*sin(theta+pi/2);
line(m, Point(xg, yg), Point(xf, yf), Scalar(128),5);
nb++;
}
}
imwrite("Fin.jpg",m);
imwrite("test.jpg",m4);
return 0;
};
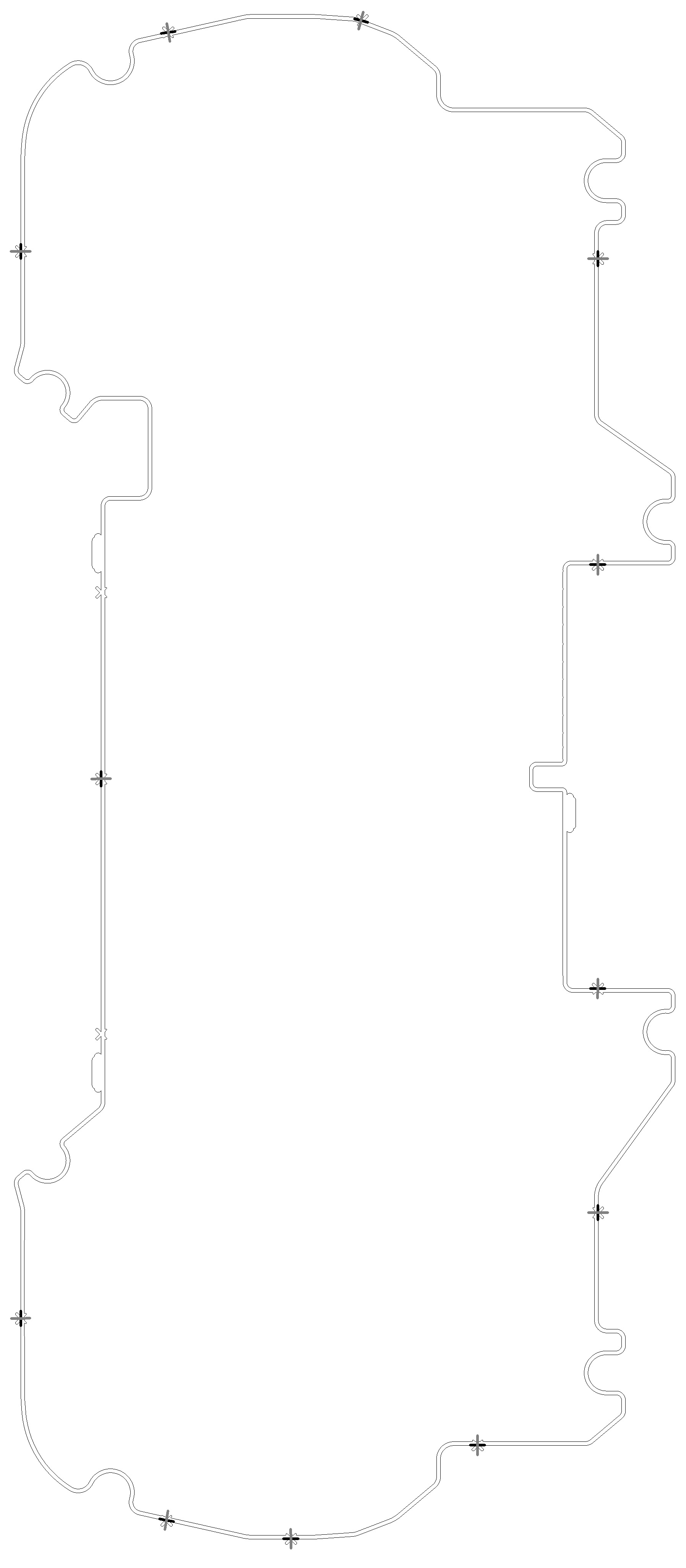
with this result
| | 10 | No.10 Revision |
0- binarize image
1-Execute four times erode using a cross operator of size 5
2-With previous result Execute 8 times dilate using same cross
3- With previous result execute 4 times erode using same cross
4- inverse result and look for contour and filter results..
One cut is missing but I think you can start with this program :
int main (int argc,char **argv)
{
Mat mTest,mThresh,mConnected;
int nbIter;
int borderType=cv::BORDER_REPLICATE;
Scalar borderValue=cv::morphologyDefaultBorderValue();
Point ancrage=cv::Point(-1,-1);
cv::Mat element = cv::getStructuringElement( MORPH_CROSS,cv::Size( 7, 7 ),cv::Point( 3, 3 ) );
Mat m=imread("C:/Users/Laurent.PC-LAURENT-VISI/Downloads/simplifiedInput.jpg",CV_LOAD_IMAGE_GRAYSCALE);
Mat m1,m2,m3,m4,m5;
nbIter=4;
threshold(m,m1,50,255,THRESH_BINARY);
imwrite("m1.png",m1);
erode(m1, m2, element,ancrage,nbIter,borderType,borderValue);
imwrite("m2.png",m2);
nbIter=7;
dilate(m2, m3, element,ancrage,nbIter,borderType,borderValue);
imwrite("m3.png",m3);
nbIter=5;
erode(m3, m4, element,ancrage,nbIter,borderType,borderValue);
imwrite("m4.png",m4);
bitwise_not(m4,m5);
Mat mClone = m5.clone();
vector<vector<cv::Point> > contours;
findContours( mClone, contours,cv::RETR_EXTERNAL,cv::CHAIN_APPROX_NONE);
vector<Moments> mo(contours.size() );
vector<Mat> hu(contours.size() );
for( int i = 0; i < contours.size(); i++ )
{
mo[i] = moments( contours[i], false );
HuMoments((const Moments)mo[i], hu[i]);
}
for( int i = 0; i < contours.size(); i++ )
{
for (int j=0;j<7;j++)
cout << hu[i].at<double>(j, 0)<<"\t";
cout << "\n";
}
for( int i = 0; i < contours.size(); i++ )
{
if (mo[i].m00>1000 && mo[i].m00<5000)
cout<<i <<" cut in : ("<< mo[i].m10/mo[i].m00 <<","<<mo[i].m01/mo[i].m00<< ")"<<1/2.0*atan(2*mo[i].mu11/(mo[i].mu20-mo[i].mu02))<<"\n";
}
int nb=0;
double pi = acos(-1.0);
for( int i = 0; i < contours.size(); i++ )
{
if (fabs(hu[i].at<double>(0, 0) - 0.2) < 0.02)
{
cout<<nb<<" "<<i <<" cut in : ("<< mo[i].m10/mo[i].m00 <<","<<mo[i].m01/mo[i].m00<< ")" <<hu[i]<<"\n";
double theta=1/2.0*atan(2*mo[i].mu11/(mo[i].mu20-mo[i].mu02));
double xg=mo[i].m10/mo[i].m00,yg=mo[i].m01/mo[i].m00;
double xf,yf;
double xf1,yf1;
double xf2,yf2;
double minorAxis2= sqrt((mo[i].mu20+mo[i].mu02-sqrt(pow(mo[i].mu20-mo[i].mu02,2.0)+4*mo[i].mu11*mo[i].mu11))/2);
if (mo[i].mu20>mo[i].mu02)
theta += pi/2;
if (theta<0)
theta += pi;
double majorAxis2= sqrt((mo[i].mu20+mo[i].mu02+sqrt(pow(mo[i].mu20-mo[i].mu02,2.0)+4*mo[i].mu11*mo[i].mu11))/2);
xf = xg + sqrt(minorAxis2)*cos(theta);
yf = yg + sqrt(minorAxis2)*sin(theta);
line(m, Point(xg, yg), Point(xf, yf), Scalar(0),5);
xf = xg - sqrt(minorAxis2)*cos(theta);
yf = yg - sqrt(minorAxis2)*sin(theta);
line(m, Point(xg, yg), Point(xf, yf), Scalar(0),5);
xf xf1 = xg + sqrt(majorAxis2)*cos(theta+pi/2);
yf yf1 = yg + sqrt(majorAxis2)*sin(theta+pi/2);
xf2 = xg - sqrt(majorAxis2)*cos(theta+pi/2);
yf2 = yg - sqrt(majorAxis2)*sin(theta+pi/2);
line(m, Point(xg, yg), Point(xf, yf), Scalar(128),5);
xf Point(xf1, yf1), Point(xf2, yf2), Scalar(255),2*sqrt(majorAxis2));
xf1 = xg - + sqrt(minorAxis2)*cos(theta)-2* sqrt(majorAxis2)*cos(theta+pi/2);
yf yf1 = yg - + sqrt(minorAxis2)*sin(theta)-2* sqrt(majorAxis2)*sin(theta+pi/2);
xf2 = xg - sqrt(minorAxis2)*cos(theta)-2* sqrt(majorAxis2)*cos(theta+pi/2);
yf2 = yg - sqrt(minorAxis2)*sin(theta)-2* sqrt(majorAxis2)*sin(theta+pi/2);
line(m, Point(xg, yg), Point(xf, yf), Scalar(128),5);
Point(xf1, yf1), Point(xf2, yf2), Scalar(0),5);
xf1 = xg + sqrt(minorAxis2)*cos(theta)+2* sqrt(majorAxis2)*cos(theta+pi/2);
yf1 = yg + sqrt(minorAxis2)*sin(theta)+2* sqrt(majorAxis2)*sin(theta+pi/2);
xf2 = xg - sqrt(minorAxis2)*cos(theta)+2* sqrt(majorAxis2)*cos(theta+pi/2);
yf2 = yg - sqrt(minorAxis2)*sin(theta)+2* sqrt(majorAxis2)*sin(theta+pi/2);
line(m, Point(xf1, yf1), Point(xf2, yf2), Scalar(0),5);
nb++;
}
}
imwrite("Fin.jpg",m);
imwrite("test.jpg",m4);
return 0;
};
with this result
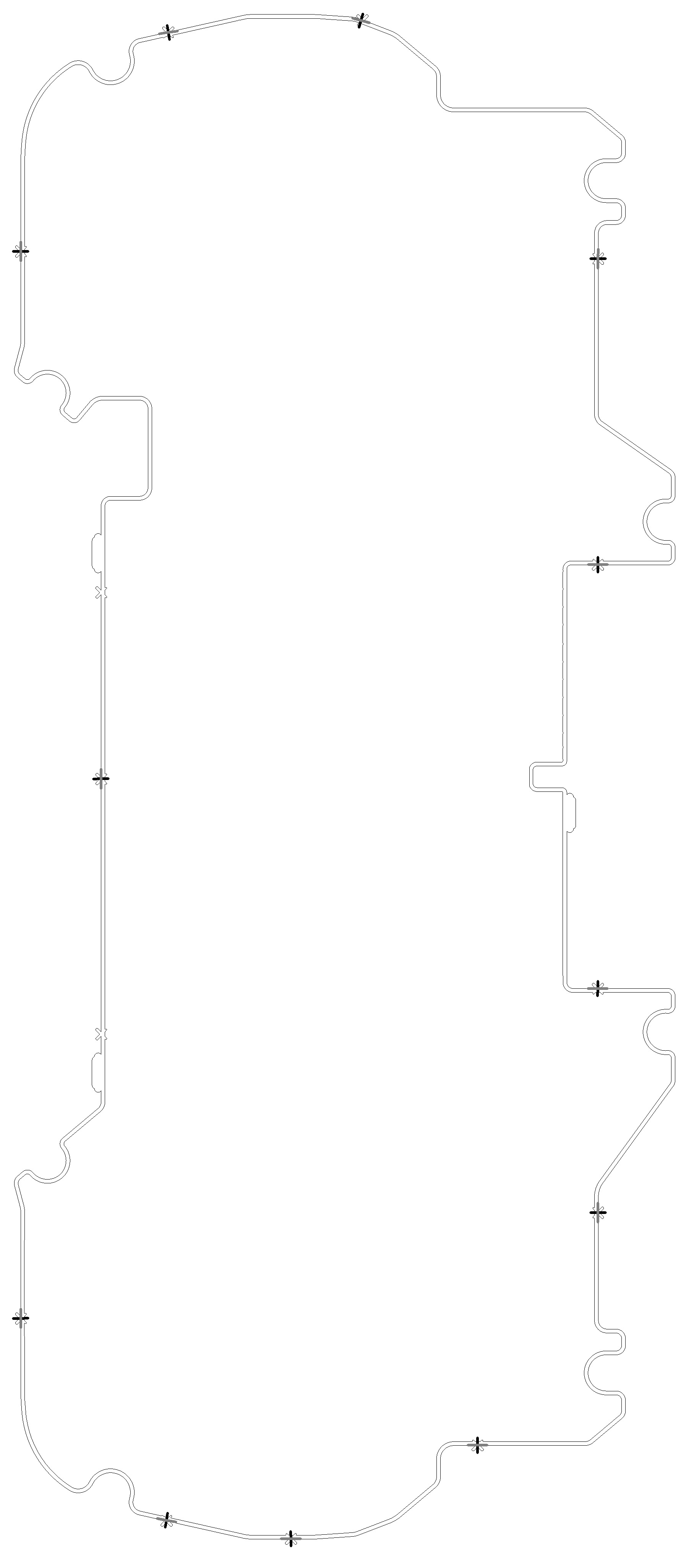
| | 11 | No.11 Revision |
0- binarize image
1-Execute four times erode using a cross operator of size 5
2-With previous result Execute 8 times dilate using same cross
3- With previous result execute 4 times erode using same cross
4- inverse result and look for contour and filter results..
One cut is missing but I think you can start with this program :
int main (int argc,char **argv)
{
Mat mTest,mThresh,mConnected;
int nbIter;
int borderType=cv::BORDER_REPLICATE;
Scalar borderValue=cv::morphologyDefaultBorderValue();
Point ancrage=cv::Point(-1,-1);
cv::Mat element = cv::getStructuringElement( MORPH_CROSS,cv::Size( 7, 7 ),cv::Point( 3, 3 ) );
Mat m=imread("C:/Users/Laurent.PC-LAURENT-VISI/Downloads/simplifiedInput.jpg",CV_LOAD_IMAGE_GRAYSCALE);
Mat m1,m2,m3,m4,m5;
nbIter=4;
threshold(m,m1,50,255,THRESH_BINARY);
imwrite("m1.png",m1);
erode(m1, m2, element,ancrage,nbIter,borderType,borderValue);
imwrite("m2.png",m2);
nbIter=7;
dilate(m2, m3, element,ancrage,nbIter,borderType,borderValue);
imwrite("m3.png",m3);
nbIter=5;
erode(m3, m4, element,ancrage,nbIter,borderType,borderValue);
imwrite("m4.png",m4);
bitwise_not(m4,m5);
Mat mClone = m5.clone();
vector<vector<cv::Point> > contours;
findContours( mClone, contours,cv::RETR_EXTERNAL,cv::CHAIN_APPROX_NONE);
vector<Moments> mo(contours.size() );
vector<Mat> hu(contours.size() );
for( int i = 0; i < contours.size(); i++ )
{
mo[i] = moments( contours[i], false );
HuMoments((const Moments)mo[i], hu[i]);
}
for( int i = 0; i < contours.size(); i++ )
{
for (int j=0;j<7;j++)
cout << hu[i].at<double>(j, 0)<<"\t";
cout << "\n";
}
for( int i = 0; i < contours.size(); i++ )
{
if (mo[i].m00>1000 && mo[i].m00<5000)
cout<<i <<" cut in : ("<< mo[i].m10/mo[i].m00 <<","<<mo[i].m01/mo[i].m00<< ")"<<1/2.0*atan(2*mo[i].mu11/(mo[i].mu20-mo[i].mu02))<<"\n";
}
int nb=0;
double pi = acos(-1.0);
for( int i = 0; i < contours.size(); i++ )
{
// if (fabs(hu[i].at<double>(0, 0) - 0.2) < 0.02)
if (mo[i].m00>1000 && mo[i].m00<5000)
{
cout<<nb<<" "<<i <<" cut in : ("<< mo[i].m10/mo[i].m00 <<","<<mo[i].m01/mo[i].m00<< ")" <<hu[i]<<"\n";
double theta=1/2.0*atan(2*mo[i].mu11/(mo[i].mu20-mo[i].mu02));
double xg=mo[i].m10/mo[i].m00,yg=mo[i].m01/mo[i].m00;
double xf1,yf1;
double xf2,yf2;
double minorAxis2= sqrt((mo[i].mu20+mo[i].mu02-sqrt(pow(mo[i].mu20-mo[i].mu02,2.0)+4*mo[i].mu11*mo[i].mu11))/2);
if (mo[i].mu20>mo[i].mu02)
theta += pi/2;
if (theta<0)
theta += pi;
double majorAxis2= sqrt((mo[i].mu20+mo[i].mu02+sqrt(pow(mo[i].mu20-mo[i].mu02,2.0)+4*mo[i].mu11*mo[i].mu11))/2);
xf1 = xg + sqrt(majorAxis2)*cos(theta+pi/2);
yf1 = yg + sqrt(majorAxis2)*sin(theta+pi/2);
xf2 = xg - sqrt(majorAxis2)*cos(theta+pi/2);
yf2 = yg - sqrt(majorAxis2)*sin(theta+pi/2);
line(m, Point(xf1, yf1), Point(xf2, yf2), Scalar(255),2*sqrt(majorAxis2));
xf1 = xg + sqrt(minorAxis2)*cos(theta)-2* sqrt(majorAxis2)*cos(theta+pi/2);
yf1 = yg + sqrt(minorAxis2)*sin(theta)-2* sqrt(majorAxis2)*sin(theta+pi/2);
xf2 = xg - sqrt(minorAxis2)*cos(theta)-2* sqrt(majorAxis2)*cos(theta+pi/2);
yf2 = yg - sqrt(minorAxis2)*sin(theta)-2* sqrt(majorAxis2)*sin(theta+pi/2);
line(m, Point(xf1, yf1), Point(xf2, yf2), Scalar(0),5);
xf1 = xg + sqrt(minorAxis2)*cos(theta)+2* sqrt(majorAxis2)*cos(theta+pi/2);
yf1 = yg + sqrt(minorAxis2)*sin(theta)+2* sqrt(majorAxis2)*sin(theta+pi/2);
xf2 = xg - sqrt(minorAxis2)*cos(theta)+2* sqrt(majorAxis2)*cos(theta+pi/2);
yf2 = yg - sqrt(minorAxis2)*sin(theta)+2* sqrt(majorAxis2)*sin(theta+pi/2);
line(m, Point(xf1, yf1), Point(xf2, yf2), Scalar(0),5);
nb++;
}
imwrite("Fin.jpg",m);
imwrite("test.jpg",m4);
return 0;
};
with this result