This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
the following code should make the trick:
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
Mat bin;
threshold(src, bin, 100, 255, CV_THRESH_BINARY);
findContours( bin, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
// merge all contours into one vector
std::vector<cv::Point> merged_contour_points;
for (size_t i = 0; i < contours.size(); i++) {
for (size_t j = 0; j < contours[i].size(); j++) {
merged_contour_points.push_back(contours[i][j]);
}
}
// get rotated bounding box
std::vector<cv::Point> hull;
cv::convexHull(cv::Mat(merged_contour_points),hull);
cv::Mat hull_points(hull);
cv::RotatedRect rotated_bounding_rect = minAreaRect(hull_points);
// get ellipse
cv::RotatedRect minEllipse = fitEllipse(hull_points);
Mat drawing = Mat::zeros( src.size(), CV_8UC3 );
for( size_t i = 0; i < contours.size(); i++ )
{
drawContours( drawing, contours, i, Scalar(255, 255, 255), 1, 8, vector<Vec4i>(), 0, Point() );
}
ellipse( drawing, minEllipse, Scalar(0, 255, 0), 1, 8 );
Point2f rect_points[4]; rotated_bounding_rect.points( rect_points );
for( int j = 0; j < 4; j++ )
line( drawing, rect_points[j], rect_points[(j+1)%4], Scalar(0, 0, 255), 1, 8 );
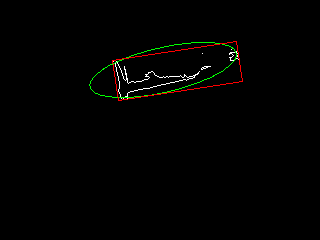
enjoy :-)
| | 2 | No.2 Revision |
the following code should make the trick:
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
Mat bin;
threshold(src, bin, 100, 255, CV_THRESH_BINARY);
findContours( bin, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
// merge all contours into one vector
std::vector<cv::Point> merged_contour_points;
for (size_t i = 0; i < contours.size(); i++) {
for (size_t j = 0; j < contours[i].size(); j++) {
merged_contour_points.push_back(contours[i][j]);
}
}
// get rotated bounding box
std::vector<cv::Point> hull;
cv::convexHull(cv::Mat(merged_contour_points),hull);
cv::Mat hull_points(hull);
cv::RotatedRect rotated_bounding_rect = minAreaRect(hull_points);
// get ellipse
cv::RotatedRect minEllipse = fitEllipse(hull_points);
Mat drawing = Mat::zeros( src.size(), CV_8UC3 );
// draw contours
for( size_t i = 0; i < contours.size(); i++ )
{
drawContours( drawing, contours, i, Scalar(255, 255, 255), 1, 8, vector<Vec4i>(), 0, Point() );
}
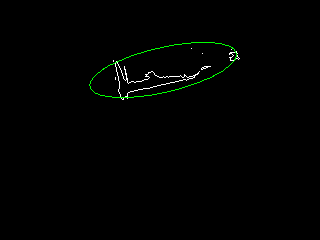
// draw ellipse
ellipse( drawing, minEllipse, Scalar(0, 255, 0), 1, 8 );
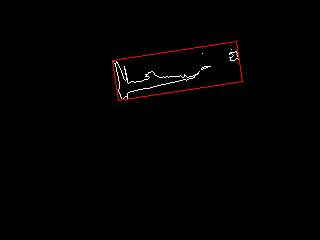
// draw rotated bounding box
Point2f rect_points[4]; rotated_bounding_rect.points( rect_points );
for( int j = 0; j < 4; j++ )
line( drawing, rect_points[j], rect_points[(j+1)%4], Scalar(0, 0, 255), 1, 8 );
enjoy :-)
| | 3 | No.3 Revision |
the following code should make do the trick:
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
Mat bin;
threshold(src, bin, 100, 255, CV_THRESH_BINARY);
findContours( bin, contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
// merge all contours into one vector
std::vector<cv::Point> merged_contour_points;
for (size_t i = 0; i < contours.size(); i++) {
for (size_t j = 0; j < contours[i].size(); j++) {
merged_contour_points.push_back(contours[i][j]);
}
}
// get rotated bounding box
std::vector<cv::Point> hull;
cv::convexHull(cv::Mat(merged_contour_points),hull);
cv::Mat hull_points(hull);
cv::RotatedRect rotated_bounding_rect = minAreaRect(hull_points);
// get ellipse
cv::RotatedRect minEllipse = fitEllipse(hull_points);
Mat drawing = Mat::zeros( src.size(), CV_8UC3 );
// draw contours
for( size_t i = 0; i < contours.size(); i++ )
{
drawContours( drawing, contours, i, Scalar(255, 255, 255), 1, 8, vector<Vec4i>(), 0, Point() );
}
// draw ellipse
ellipse( drawing, minEllipse, Scalar(0, 255, 0), 1, 8 );
// draw rotated bounding box
Point2f rect_points[4]; rotated_bounding_rect.points( rect_points );
for( int j = 0; j < 4; j++ )
line( drawing, rect_points[j], rect_points[(j+1)%4], Scalar(0, 0, 255), 1, 8 );
enjoy :-)
