This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Have a look in the code below, for sure it needs some optimization but I guess it will provide you with an idea how to deal with your problem. Moreover, I used another image with a different perspective but I do not think that this changes a lot.
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
// Load image
Mat img = imread("chessboard.png");
// Check if image is loaded successfully
if(!img.data || img.empty())
{
cout << "Problem loading image!!!" << endl;
return EXIT_FAILURE;
}
imshow("src", img);
// Convert image to grayscale
Mat gray;
cvtColor(img, gray, COLOR_BGR2GRAY);
// Convert image to binary
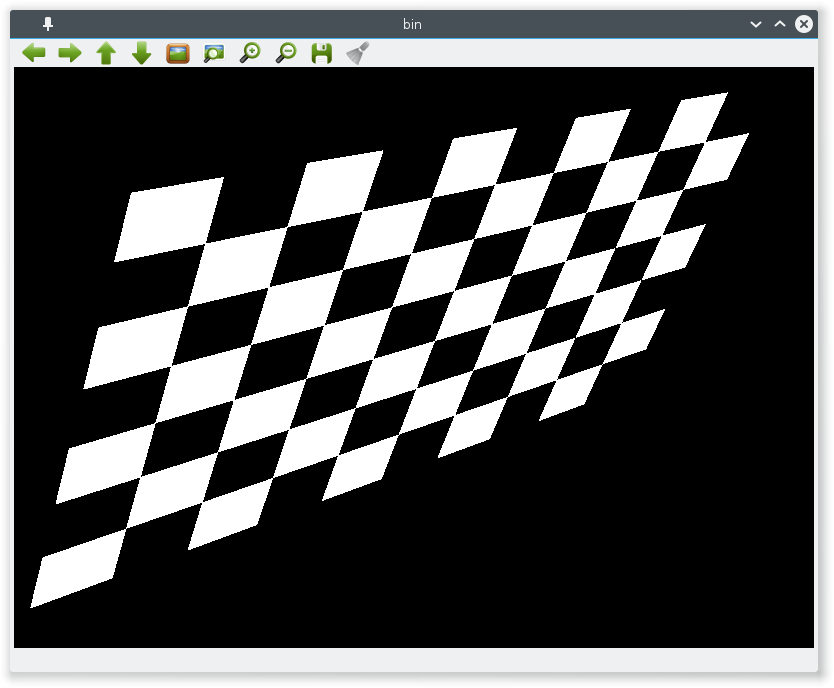
Mat bin;
threshold(gray, bin, 50, 255, CV_THRESH_BINARY_INV | CV_THRESH_OTSU);
imshow("bin", bin);
// Dilate a bit in order to fill any gap between the joints
Mat kernel = Mat::ones(2, 2, CV_8UC1);
dilate(bin, bin, kernel);
// imshow("dilate", bin);
// Find external contour
vector<Vec4i> hierarchy;
std::vector<std::vector<cv::Point> > contours;
cv::findContours(bin.clone(), contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
// Find the convex hull object of the external contour
vector<vector<Point> >hull( contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{ convexHull( Mat(contours[i]), hull[i], false ); }
// We'll put the labels in this destination image
cv::Mat dst = Mat::zeros(bin.size(), CV_8UC3);
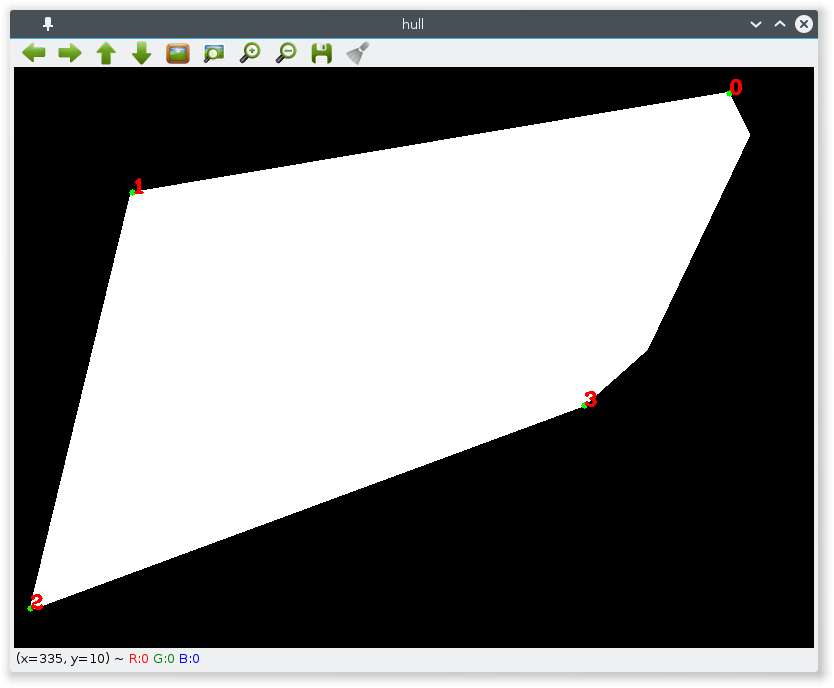
// Draw the contour as a solid blob filling also any convexity defect with the extracted hulls
for (size_t i = 0; i < contours.size(); i++)
drawContours( dst, hull, i, Scalar(255, 255, 255), CV_FILLED/*1*/, 8, vector<Vec4i>(), 0, Point() );
// Extract the new blob and the approximation curve that represents it
Mat bw;
cvtColor(dst, bw, CV_BGR2GRAY);
cv::findContours(bw.clone(), contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
// The array for storing the approximation curve
std::vector<cv::Point> approx;
Mat src = img.clone();
for (size_t i = 0; i < contours.size(); i++)
{
// Approximate contour with accuracy proportional
// to the contour perimeter with approxPolyDP. In this,
// third argument is called epsilon, which is maximum
// distance from contour to approximated contour. It is
// an accuracy parameter. A wise selection of epsilon is
//needed to get the correct output.
double epsilon = cv::arcLength(cv::Mat(contours[i]), true) * 0.02; // epsilon = 2% of arc length
cv::approxPolyDP(
cv::Mat(contours[i]),
approx,
epsilon,
true
);
cout << "approx: " << approx.size() << endl;
// visuallize result
for(size_t j = 0; j < approx.size(); j++)
{
string text = to_string(static_cast<int>(j));
circle(src, approx[j], 3, Scalar(0, 255, 0), CV_FILLED);
circle(dst, approx[j], 3, Scalar(0, 255, 0), CV_FILLED);
putText(src, text, approx[j], FONT_HERSHEY_COMPLEX_SMALL, 1, Scalar( 0, 0, 255 ), 2);
putText(dst, text, approx[j], FONT_HERSHEY_COMPLEX_SMALL, 1, Scalar( 0, 0, 255 ), 2);
}
}
imshow("hull", dst);
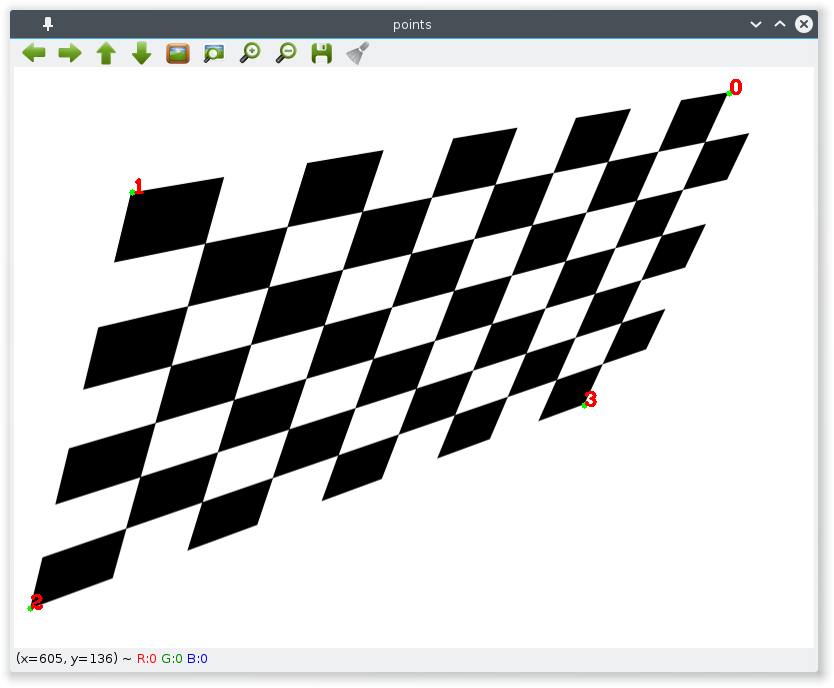
imshow("points", src);
// find a more automated way to deal with the points here and extract the perspective, this is done in a hurry
vector<Point2f> p,q;
p.push_back(approx[2]);
q.push_back(Point2f(0,0));
p.push_back(approx[1]);
q.push_back(Point2f(200,0));
p.push_back(approx[0]);
q.push_back(Point2f(200,200));
p.push_back(approx[3]);
q.push_back(Point2f(0,200));
Mat rotation = cv::getPerspectiveTransform(p,q);
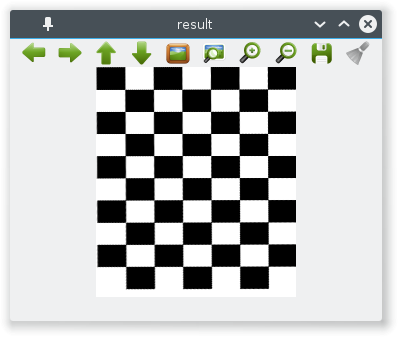
Mat result;
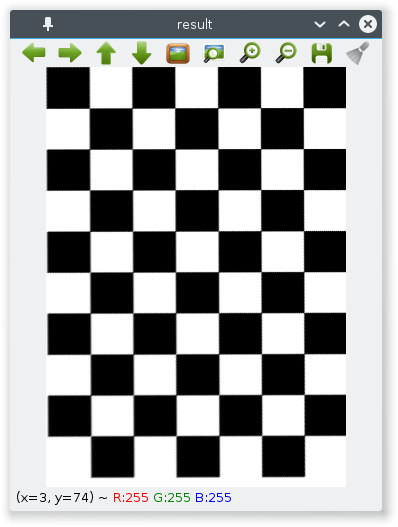
cv::warpPerspective(img, result, rotation, Size(200,230));
imshow("result",result);
waitKey(0);
return 0;
}
| | 2 | No.2 Revision |
Have a look in the code below, for sure it needs some optimization but I guess it will provide you with an idea how to deal with your problem. Moreover, I used another image with a different perspective but I do not think that this changes a lot.
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
// Load image
Mat img = imread("chessboard.png");
// Check if image is loaded successfully
if(!img.data || img.empty())
{
cout << "Problem loading image!!!" << endl;
return EXIT_FAILURE;
}
imshow("src", img);
// Convert image to grayscale
Mat gray;
cvtColor(img, gray, COLOR_BGR2GRAY);
// Convert image to binary
Mat bin;
threshold(gray, bin, 50, 255, CV_THRESH_BINARY_INV | CV_THRESH_OTSU);
imshow("bin", bin);
// Dilate a bit in order to fill any gap between the joints
Mat kernel = Mat::ones(2, 2, CV_8UC1);
dilate(bin, bin, kernel);
// imshow("dilate", bin);
// Find external contour
vector<Vec4i> hierarchy;
std::vector<std::vector<cv::Point> > contours;
cv::findContours(bin.clone(), contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
// Find the convex hull object of the external contour
vector<vector<Point> >hull( contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{ convexHull( Mat(contours[i]), hull[i], false ); }
// We'll put the labels in this destination image
cv::Mat dst = Mat::zeros(bin.size(), CV_8UC3);
// Draw the contour as a solid blob filling also any convexity defect with the extracted hulls
for (size_t i = 0; i < contours.size(); i++)
drawContours( dst, hull, i, Scalar(255, 255, 255), CV_FILLED/*1*/, 8, vector<Vec4i>(), 0, Point() );
// Extract the new blob and the approximation curve that represents it
Mat bw;
cvtColor(dst, bw, CV_BGR2GRAY);
cv::findContours(bw.clone(), contours, hierarchy, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
// The array for storing the approximation curve
std::vector<cv::Point> approx;
Mat src = img.clone();
for (size_t i = 0; i < contours.size(); i++)
{
// Approximate contour with accuracy proportional
// to the contour perimeter with approxPolyDP. In this,
// third argument is called epsilon, which is maximum
// distance from contour to approximated contour. It is
// an accuracy parameter. A wise selection of epsilon is
//needed to get the correct output.
double epsilon = cv::arcLength(cv::Mat(contours[i]), true) * 0.02; // epsilon = 2% of arc length
cv::approxPolyDP(
cv::Mat(contours[i]),
approx,
epsilon,
true
);
cout << "approx: " << approx.size() << endl;
// visuallize result
for(size_t j = 0; j < approx.size(); j++)
{
string text = to_string(static_cast<int>(j));
circle(src, approx[j], 3, Scalar(0, 255, 0), CV_FILLED);
circle(dst, approx[j], 3, Scalar(0, 255, 0), CV_FILLED);
putText(src, text, approx[j], FONT_HERSHEY_COMPLEX_SMALL, 1, Scalar( 0, 0, 255 ), 2);
putText(dst, text, approx[j], FONT_HERSHEY_COMPLEX_SMALL, 1, Scalar( 0, 0, 255 ), 2);
}
}
imshow("hull", dst);
imshow("points", src);
// find a more automated way to deal with the points here and extract the perspective, this is done in a hurry
vector<Point2f> p,q;
p.push_back(approx[2]);
q.push_back(Point2f(0,0));
p.push_back(approx[1]);
q.push_back(Point2f(200,0));
q.push_back(Point2f(300,0));
p.push_back(approx[0]);
q.push_back(Point2f(200,200));
q.push_back(Point2f(300,370));
p.push_back(approx[3]);
q.push_back(Point2f(0,200));
q.push_back(Point2f(0,370));
Mat rotation = cv::getPerspectiveTransform(p,q);
Mat result;
cv::warpPerspective(img, result, rotation, Size(200,230));
Size(300,420));
imshow("result",result);
waitKey(0);
return 0;
}