This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
Ok I tryed with 6x6 marker and with picters out of the center but result is still verry bad. I´m out of ideas now.
| | 2 | No.2 Revision |
Ok I tryed with 6x6 marker and with picters out of the center but result is still verry bad.
I´m out of ideas now. tried this code:
There is not much different but the results are great, not sure what is wrong on my code!!
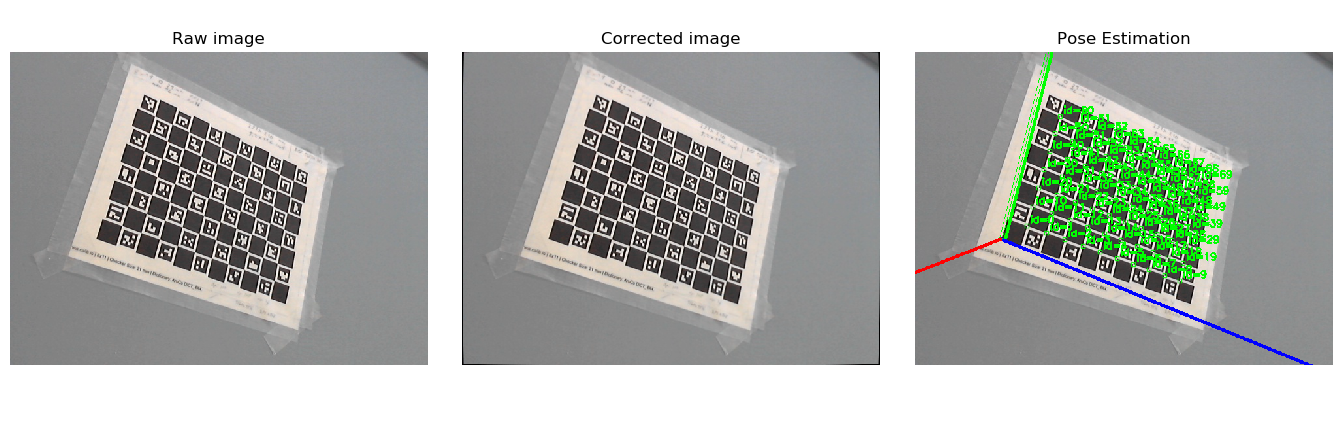
And results look more Plausible
Rep Error: 0.333780710349104 cam_matrix
[[802.67522005 0. 299.59488625]
[ 0. 791.74437284 231.08205004]
[ 0. 0. 1. ]]
| | 3 | No.3 Revision |
I tried this code:
https://github.com/nullboundary/CharucoCalibration
There is not much different but the results are great, not sure what is wrong on my code!!
And results look more Plausible plausible
Rep Error: 0.333780710349104 cam_matrix
[[802.67522005 0. 299.59488625]
[ 0. 791.74437284 231.08205004]
[ 0. 0. 1. ]]