This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
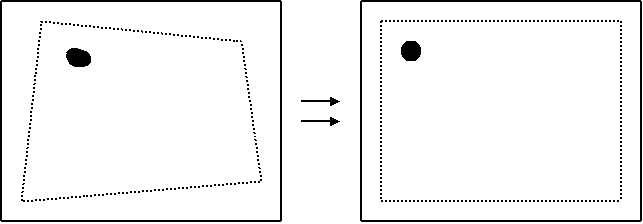
1st-------2nd
| |
| |
| |
3rd-------4th
cv::Mat src= cv::imread( "c://03p.jpg",0);
if (!src.data)
return 0;
vector<Point> not_a_rect_shape;
not_a_rect_shape.push_back(Point(122,0));
not_a_rect_shape.push_back(Point(814,0));
not_a_rect_shape.push_back(Point(22,540));
not_a_rect_shape.push_back(Point(910,540));
// For debugging purposes, draw green lines connecting those points
// and save it on disk
const Point* point = ¬_a_rect_shape[0];
int n = (int )not_a_rect_shape.size();
Mat draw = src.clone();
polylines(draw, &point, &n, 1, true, Scalar(0, 255, 0), 3, CV_AA);
imwrite( "draw.jpg", draw);
// Assemble a rotated rectangle out of that info
RotatedRect box = minAreaRect(cv::Mat(not_a_rect_shape));
std::cout << "Rotated box set to (" << box.boundingRect().x << "," << box.boundingRect().y << ") " << box.size.width << "x" << box.size.height << std::endl;
// Does the order of the points matter? I assume they do NOT.
// But if it does, is there an easy way to identify and order
// them as topLeft, topRight, bottomRight, bottomLeft?
//(0,0) (960,0) (0,540) (960,540)
cv::Point2f src_vertices[4];
src_vertices[0] = not_a_rect_shape[0];
src_vertices[1] = not_a_rect_shape[1];
src_vertices[2] = not_a_rect_shape[2];
src_vertices[3] = not_a_rect_shape[3];
Point2f dst_vertices[4];
dst_vertices[0] = Point(0, 0);
dst_vertices[1] = Point(960,0);
dst_vertices[2] = Point(0,540);
dst_vertices[3] = Point(960,540);
Mat warpMatrix = getPerspectiveTransform(src_vertices, dst_vertices);
cv::Mat rotated;
warpPerspective(src, rotated, warpMatrix, rotated.size(), INTER_LINEAR, BORDER_CONSTANT);
// Display the image
cv::namedWindow( "Original Image");
cv::imshow( "Original Image",src);
cv::namedWindow( "warp perspective");
cv::imshow( "warp perspective",rotated);
imwrite( "03p.jpg",src);
cv::waitKey();
return 0;
| | 2 | No.2 Revision |
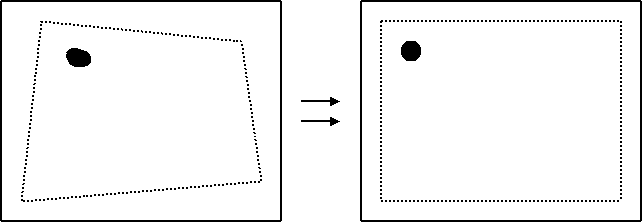

1st-------2nd
| |
| |
| |
3rd-------4th
cv::Mat src= cv::imread( "c://03p.jpg",0);
if (!src.data)
return 0;
vector<Point> not_a_rect_shape;
not_a_rect_shape.push_back(Point(122,0));
not_a_rect_shape.push_back(Point(814,0));
not_a_rect_shape.push_back(Point(22,540));
not_a_rect_shape.push_back(Point(910,540));
// For debugging purposes, draw green lines connecting those points
// and save it on disk
const Point* point = ¬_a_rect_shape[0];
int n = (int )not_a_rect_shape.size();
Mat draw = src.clone();
polylines(draw, &point, &n, 1, true, Scalar(0, 255, 0), 3, CV_AA);
imwrite( "draw.jpg", draw);
// Assemble a rotated rectangle out of that info
RotatedRect box = minAreaRect(cv::Mat(not_a_rect_shape));
std::cout << "Rotated box set to (" << box.boundingRect().x << "," << box.boundingRect().y << ") " << box.size.width << "x" << box.size.height << std::endl;
// Does the order of the points matter? I assume they do NOT.
// But if it does, is there an easy way to identify and order
// them as topLeft, topRight, bottomRight, bottomLeft?
//(0,0) (960,0) (0,540) (960,540)
cv::Point2f src_vertices[4];
src_vertices[0] = not_a_rect_shape[0];
src_vertices[1] = not_a_rect_shape[1];
src_vertices[2] = not_a_rect_shape[2];
src_vertices[3] = not_a_rect_shape[3];
Point2f dst_vertices[4];
dst_vertices[0] = Point(0, 0);
dst_vertices[1] = Point(960,0);
dst_vertices[2] = Point(0,540);
dst_vertices[3] = Point(960,540);
Mat warpMatrix = getPerspectiveTransform(src_vertices, dst_vertices);
cv::Mat rotated;
warpPerspective(src, rotated, warpMatrix, rotated.size(), INTER_LINEAR, BORDER_CONSTANT);
// Display the image
cv::namedWindow( "Original Image");
cv::imshow( "Original Image",src);
cv::namedWindow( "warp perspective");
cv::imshow( "warp perspective",rotated);
imwrite( "03p.jpg",src);
cv::waitKey();
return 0;
