This forum is disabled, please visit https://forum.opencv.org
| | 1 | initial version |
No you don't have to normalize the values for objectPoints. If you do it, the translation should be estimated up to a scale factor.
The common requirements are:
I think that some configurations could lead to singularities or camera pose badly esimated or completly wrong. For instance, if all the imagePoints are projected almost on a same line (with 4 coplanar 3D points for instance)?
| | 2 | No.2 Revision |
No you don't have to normalize the values for objectPoints. If you do it, the translation should be estimated up to a scale factor.
The common requirements are:
I think that some configurations could lead to singularities or camera pose badly esimated or completly wrong. For instance, if all the imagePoints are projected almost on a same line (with 4 coplanar 3D points for instance)?
Edit:
I found an interesting course, "The Perspective View of 3 Points" by Bill Wolfe, which give the following information:
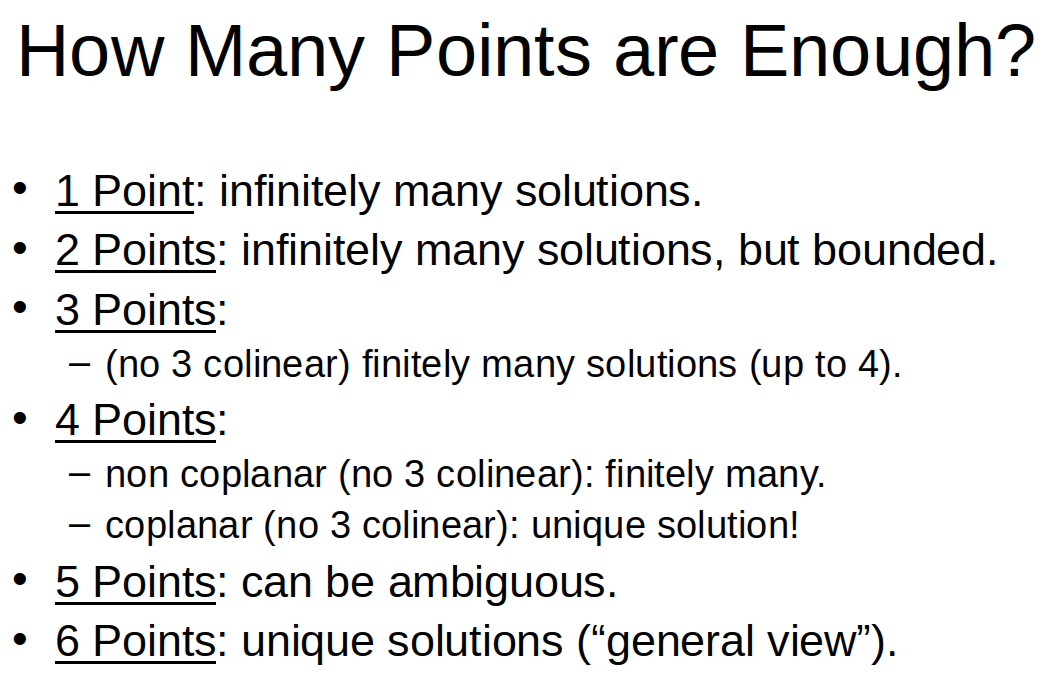
| | 3 | No.3 Revision |
No you don't have to normalize the values for objectPoints. If you do it, the translation should be estimated up to a scale factor.
The common requirements are:
I think that some configurations could lead to singularities or camera pose badly esimated or completly wrong. For instance, if all the imagePoints are projected almost on a same line (with 4 coplanar 3D points for instance)?
Edit:
I found an interesting course, "The "The Perspective View of 3 Points" Points" by Bill Wolfe, which give the following information: